Aufbau einer Schulter und eines Rumpfes
Alles klar, mal sehen, wie es weitergeht. In diesem Tuto werden wir die Schulter und den Rumpf gleichzeitig bauen. Ich hätte es lieber separat gemacht, aber meine Bilder wurden bereits auf diese Weise erstellt, und ich werde den Roboter nicht auseinandernehmen, um neue Bilder zu machen.
Eine 3D Ansicht finden Sie hier!
Skizze 3D: Schulter ist hier! Die Skizze 3D: Torso ist hier! Und hier ist Skizze 3D: Torso+Kinect-Umgebung.
Basisinformationen:
Für den Druck der 3D-Modelle verwenden wir diesen Drucker.
Um den Druck gewährleisten zu können, sollten folgende Informationen beachtet werden!
Für die Filament Beschaffung können diese Posts eventuell sehr hilfreich sein.
Druckanweisungen:
Eine Füllung von 30 %, Wandstärke 2,5 mm, am besten ohne Steg, ohne Stütze (sofern nicht anders angegeben), bei großen Teilen eine Krempe verwenden, um Verformungen zu vermeiden.
Download STL-Files für und die Anzahl der benötigten Dateien für den Rumpf:
– 2x ChestLowV1 Filament: PETG Farbe: Schwarz Verbrauch: 13 g Druckzeit: 0:19 Std.
– 2x HomLowBackV2 Filament: PETG Farbe: Schwarz Verbrauch: 29 g Druckzeit: 0:44 Std.
– 2x HomLowFront-V1 Filament: PETG Farbe: Schwarz Verbrauch: 32 g Druckzeit: 0:46 Std.
– 2x InterKinectMidV1 Filament: PETG Farbe: Schwarz Verbrauch: 20 g Druckzeit: 0:31 Std.
– 2x InterKinectSideV1 Filament: PETG Farbe: Schwarz Verbrauch: 15 g Druckzeit: 0:26 Std.
– 1x KinectMidBackV1 Filament: PETG Farbe: Schwarz Verbrauch: 46 g Druckzeit: 1:03 Std.
– 1x KinectMidFrontV1 Filament: PETG Farbe: Schwarz Verbrauch: 20 g Druckzeit: 0:20 Std.
– 2x KinectSideBackV2 Filament: PETG Farbe: Schwarz Verbrauch: 44 g Druckzeit: 1:09 Std.
– 2x KinectSideHolderV1 Filament: PETG Farbe: Schwarz Verbrauch: 32 g Druckzeit: 0:52 Std.
Diese Dateien werden zwar für den Rumpf benötigt, sind aber in diesem Tuto nicht unbedingt nötig !
Da es für diese Teile keine extra Anleitung gibt, die Teile sind aber einfach zu verbauen, anhand der beigefügten
Bilder, kann sie am besten gleich mit Drucken und verbauen.
– arduinosupportmega Filament: PETG Farbe: Schwarz Verbrauch: 13 g Druckzeit: 0:21 Std.
– homplateback+V1 Filament: PETG Farbe: Schwarz Verbrauch: 24 g Druckzeit: 0:36 Std.
– homplatebacklow+V1 Filament: PETG Farbe: Schwarz Verbrauch: 21 g Druckzeit: 0:32 Std.
– homplatebacklow-V1 Filament: PETG Farbe: Schwarz Verbrauch: 21 g Druckzeit: 0:32 Std.
– homplateback-V1 Filament: PETG Farbe: Schwarz Verbrauch: 23 g Druckzeit: 0:35 Std.
– homplatefront+V1 Filament: PETG Farbe: Schwarz Verbrauch: 28 g Druckzeit: 0:41 Std.
– homplatefront-V1 Filament: PETG Farbe: Schwarz Verbrauch: 26 g Druckzeit: 0:41 Std.
– servoHolsterV1 Filament: PETG Farbe: Schwarz Verbrauch: 20 g Druckzeit: 0:45 Std.
– SternumV1 Filament: PETG Farbe: Schwarz Verbrauch: 30 g Druckzeit: 0:46 Std.
– 2x ThroatLowerV1 Filament: PETG Farbe: Schwarz Verbrauch: 36 g Druckzeit: 0:36 Std.
Druckzeit: Std. Filament-Verbrauch: g
Download STL-Files und Anzahl der Druckdateien für die rechte Schulter:
– 1x ClaviBack Filament: PETG Farbe: Schwarz Verbrauch: 30 g Druckzeit: 0:45 Std.
– 1x ClaviFront Filament: PETG Farbe: Schwarz Verbrauch: 33 g Druckzeit: 0:51 Std.
– 1x PistonClavi Filament: PETG Farbe: Schwarz Verbrauch: 24 g Druckzeit: 1:22 Std.
– 1x Pistonbase Filament: PETG Farbe: Schwarz Verbrauch: 18 g Druckzeit: 0:45 Std.
– 2x PivConnector Filament: PETG Farbe: Schwarz Verbrauch: 16 g Druckzeit: 0:26 Std.
– 1x PivGear Filament: PETG Farbe: Schwarz Verbrauch: 27 g Druckzeit: 1:02 Std.
– 1x PivMit ( +Stützen ) Filament: PETG Farbe: Schwarz Verbrauch: 41 g Druckzeit: 1:09 Std.
– 2x PivPotentioRound oder PivPotentioSquare Filament: PETG Farbe: Schwarz Verbrauch: 3 g Druckzeit: 0:07 Std.
– 1x PivPotholder Filament: PETG Farbe: Schwarz Verbrauch: 15 g Druckzeit: 0:36 Std.
– 1x PivTit ( +Stützen ) Filament: PETG Farbe: Schwarz Verbrauch: 29 g Druckzeit: 0:50 Std.
– 1x PivWorm Filament: PETG Farbe: Schwarz Verbrauch: 12 g Druckzeit: 0:35 Std.
– 1x Pivcenter Filament: PETG Farbe: Schwarz Verbrauch: 61 g Druckzeit: 2:04 Std.
– 1x servoHolster ( +Stützen) Filament: PETG Farbe: Schwarz Verbrauch: 20 g Druckzeit: 0:45 Std.
– 1x Servohalter Filament: PETG Farbe: Schwarz Verbrauch: 26 g Druckzeit: 0:44 Std.
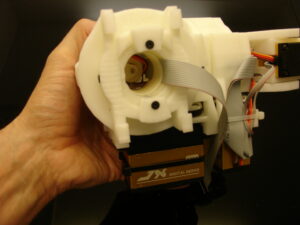
– 1x LogoRightMyrobotlabV2 Filament: PETG Farbe: Silber Verbrauch: 12 g Druckzeit: 0:25 Std.
Druckzeit: Std. Filament-Verbrauch: g
Download STL-Files und Anzahl der Druckdateien für die linke Schulter:
– 1x ClaviBack Filament: PETG Farbe: Schwarz Verbrauch: 30 g Druckzeit: 0:45 Std.
– 1x ClaviFront Filament: PETG Farbe: Schwarz Verbrauch: 33 g Druckzeit: 0:51 Std.
– 1x PistonClavi Filament: PETG Farbe: Schwarz Verbrauch: 24 g Druckzeit: 1:22 Std.
– 1x Pistonbase Filament: PETG Farbe: Schwarz Verbrauch: 18 g Druckzeit: 0:45 Std.
– 2x PivConnector Filament: PETG Farbe: Schwarz Verbrauch: 16 g Druckzeit: 0:26 Std.
– 1x PivGear Filament: PETG Farbe: Schwarz Verbrauch: 27 g Druckzeit: 1:02 Std.
– 1x LeftPivMit ( +Stützen ) Filament: PETG Farbe: Schwarz Verbrauch: 41 g Druckzeit: 1:09 Std.
– 2x PivPotentioRound oder PivPotentioSquare Filament: PETG Farbe: Schwarz Verbrauch: 3 g Druckzeit: 0:07 Std.
– 1x LeftPivPotholder Filament: PETG Farbe: Schwarz Verbrauch: 15 g Druckzeit: 0:36 Std.
– 1x LeftPivTit ( +Stützen ) Filament: PETG Farbe: Schwarz Verbrauch: 29 g Druckzeit: 0:50 Std.
– 1x PivWorm Filament: PETG Farbe: Schwarz Verbrauch: 12 g Druckzeit: 0:35 Std.
– 1x LeftPivcenter Filament: PETG Farbe: Schwarz Verbrauch: 61 g Druckzeit: 2:04 Std.
– 1x servoHolster ( +Stützen) Filament: PETG Farbe: Schwarz Verbrauch: 20 g Druckzeit: 0:45 Std.
– 1x Servohalter Filament: PETG Farbe: Schwarz Verbrauch: 26 g Druckzeit: 0:44 Std.
– 1x LogoLeftMyrobotlabV2 Filament: PETG Farbe: Silber Verbrauch: 12 g Druckzeit: 0:25 Std.
Druckzeit: Std. Filament-Verbrauch:
Benötigte Materialien und Technik:
– 2 x 4 Stück Edelstahlschraube (Torx): M3 x 34-35mm
(Schultergelenk zusammenzuschrauben. Exaktes Maß notwendig, es darf nichts überstehen)
– 2 x 4 Stück Edelstahlschraube (Torx): M3 x 33mm
(Schultergelenk am Torso befestigen und Arm am Schultergelenk befestigen)
– 2 x 4 Stück Edelstahlschraube (Torx): M3 x 20mm
(Schultergelenk am Torso befestigen und Arm am Schultergelenk befestigen)
– 2 x 1 Stück Edelstahlschraube (Torx/Innensechskant): M5 x 90mm
– 2 x 1 Stück M5 Edelstahlmutter
Abschnitt 1:
Hilfe Videos für den Servo Hack finden Síe hier!
Eine PDF für einen anderen Servo Hack ist hier zu finden!
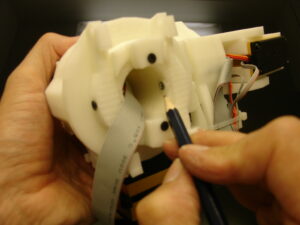
Was wir in diesem ersten Tuto tun wollen, ist, das Potentiometer der beiden Servos zu extrahieren und durch Schweißen zusätzliche Kabellänge hinzuzufügen.
WICHTIG: Im letzten Teil gibt es jedoch einen Unterschied beim erneuten Anschweißen der Kabel an das Potentiometer, je nachdem, ob Sie die rechte oder linke Schulter bauen.

Schweißen Sie die Kabel auf diese Weise, wenn Sie die rechte Schulter bauen. In diesem Bild ersetzt das blaue das blaue oder das schwarze Kabel, abhängig von Ihren Servos.

Schweißen Sie die Kabel auf diese Weise, wenn Sie die linke Schulter bauen. In diesem Bild ersetzt das blaue das rote oder das schwarze Kabel, abhängig von Ihren Servos
Dadurch kann sich Ihr Servo in die entgegengesetzte Richtung drehen, sodass Ihre anfängliche 0-Position zu Ihrer 180-Position wird. Und Ihre anfängliche 180-Position wird zu Ihrer 0-Position. Ich hoffe, Sie verstehen die Idee. Dies wird an beiden Servos durchgeführt, die in jeder Schulter verwendet werden. Beginnen wir nun mit der Montage.
Abschnitt 2:
Wenn Sie vorhaben, beide Schultern zu trainieren, sollten Sie die meisten der folgenden Schritte für die andere Körperseite wiederholen.

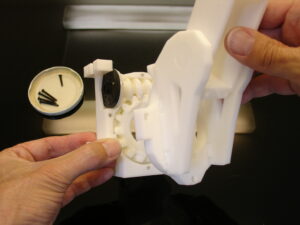
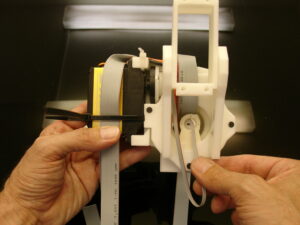
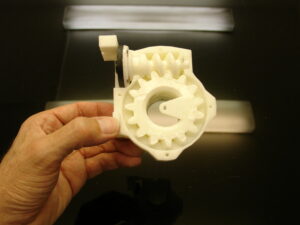
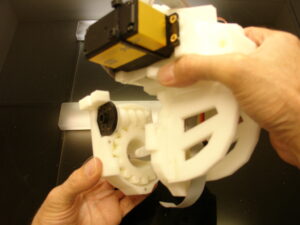
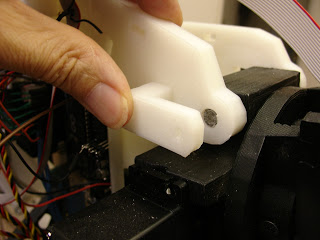
Entfernen Sie die vorgefertigte Stütze unter „PistonBase“.Stellen Sie sicher, dass „PistonClavi“ im Inneren frei laufen kann. Wenn Ihre Drucke etwas zu eng sind, können Sie dies mit Fett lindern. Ich musste meinen Drucker für diese Teile feinabstimmen, um die richtige Einstellung zu erhalten.

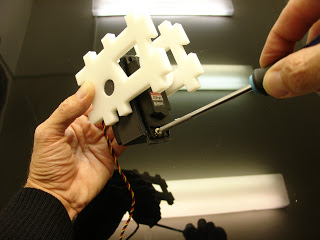
Zusammenbauen mit Ihren Lieblingszangen „PistoBase“, „ClaviBack“ und „HomPlatback+“.Wenn Sie aus PLA bauen, können Sie die Teile mit einer Heißluftpistole erwärmen, damit sie leichter passen und ein Bremsen der Teile vermieden wird.Stellen Sie sicher, dass sich „PistoBase“ reibungslos drehen lässt.
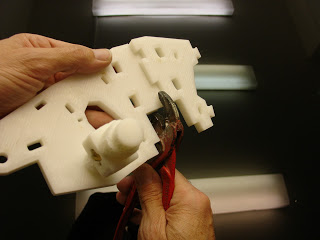
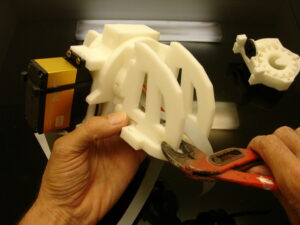
„HomPlatback-“ zu „HomPlatback+“ hinzufügenHier können Sie meine Lieblingszange in Aktion sehen.

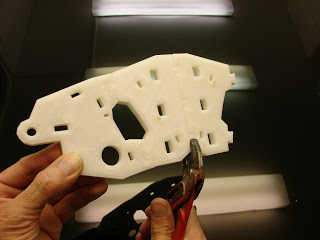
„ThroatHole“ zu „HomPlatback-“ zu „HomPlatback+“ hinzufügen„ThroatHole“ wurde seit diesem Bild geändert.
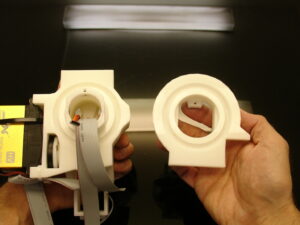
Zeit, die Front zusammenzubauen. Montieren Sie „Sternum“ an „ClaviFront“.Tut mir leid, dass dieses Bild die erste Version zeigt, die ich gemacht habe, aber es kommt ziemlich nah dran, sehen Sie sich das nächste Bild an.
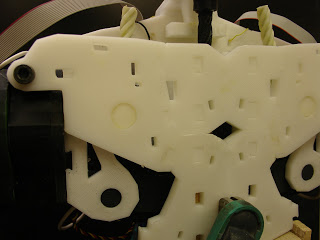
Dies ist die Form, die Sie mit der letzten Version und dem letzten „ThroatHole“ auf der Rückseite erhalten.
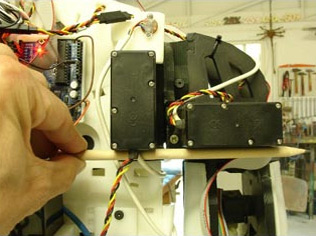
Montieren Sie die beiden „ThroatLower“ und „ServoHolster“ zusammen.Dieses in der Mitte des Rumpfes angebrachte Servo dient zum Auf- und Abbewegen des Kopfes und kann bei Bedarf später hinzugefügt werden, das Holster sollte jedoch bereits angebracht sein.
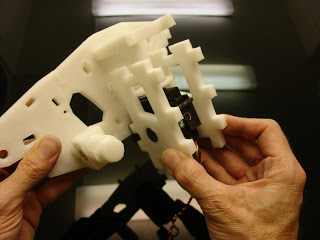
Befestigen Sie diese Baugruppe an der hinteren Baugruppe. Überprüfen Sie auf dem Bild die Plots und die Position des Servos. Vordere und hintere Clips sind unterschiedlich.


Fügen Sie die vordere Baugruppe zum Rest hinzu.

Sie können sich mit Klammern helfen. Es sollte alles gut passen. Man kann Aceton hinzufügen, um Teile zusammenzukleben, aber ich habe es noch nicht gemacht und es hält seit einigen Testwochen zusammen.
Abschnitt 3:

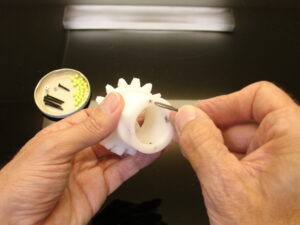
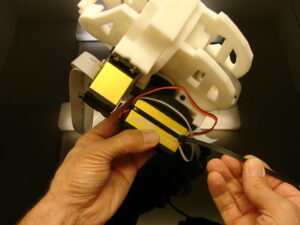
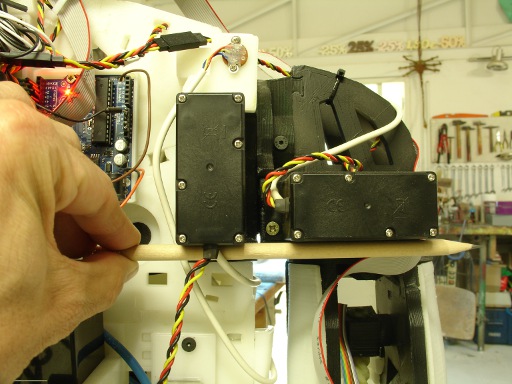
In diesem Teil des Tutorials sehen Sie gelbe BBgun-Kugeln von 6 mm.Seien Sie vorsichtig mit der Art des Fetts, das Sie verwenden. Manches Fett färbt die bedruckten Teile oder löst sogar die BBGun-Kugeln auf. Das weiße Fett, das Sie auf diesem Bild sehen, erwies sich bei den BBGun-Kugeln aus Kunststoff als schrecklich. Ich musste alle Kugeln durch Stahlkugeln ersetzen.Diese können natürlich auch durch Stahlkugeln ersetzt werden. Auch in diesem Teil des Tutorials verwende ich ein anderes Servo als das HS805bb. Diese anderen Servos scheinen sehr gut zu sein und der Preis ist angemessen. (Ref. PDI-HV2060MG)

Setzen Sie in jedes Mutterngehäuse 3-mm-Muttern ein, diese können mit einer Zange hineingedrückt werden.

Befestigen Sie die Mutter mit geschmolzenem ABS- oder Epoxidkleber.
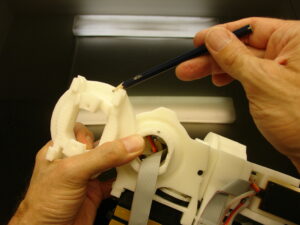
Bohren Sie die Löcher erneut und stellen Sie sicher, dass Ihre 3-mm-Schraube richtig in der Mutter einrastet.

Achten Sie darauf, dass der Potentiometerschaft perfekt in das Loch passt. Verwenden Sie ggf. eine kleine Feile.

Stellen Sie außerdem sicher, dass der Körper des Potentiometers gut in das PivPotentioRound passt (je nach Potentiometer müssen Sie möglicherweise die quadratische Version verwenden).

Montieren Sie PivTit und ServoHolder und kleben Sie sie zusammen. ServoHolster muss eingesetzt werden, darf aber NICHT geklebt werden, damit es sich frei drehen kann.
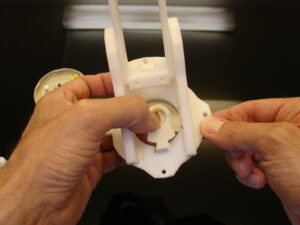
Drücken Sie PivPotentioRound in PivTit. Normalerweise hat es keinen Sinn, es zu kleben.

Markieren Sie die 4 Löcher oder setzen Sie 4 3-mm-Muttern auf der Rückseite des PivCenters ein.

Bohren Sie die Löcher erneut mit einer 3,5-mm-Bohrung auf PivMit.

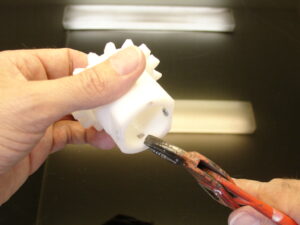
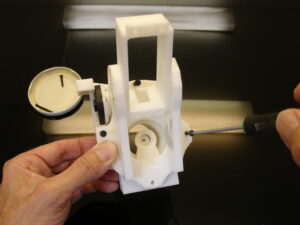
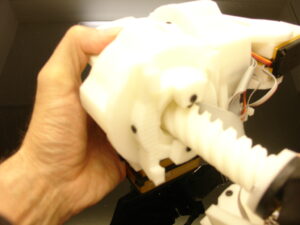
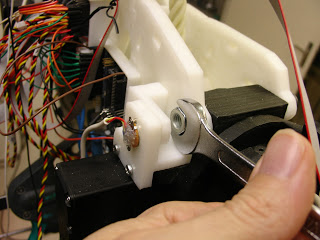
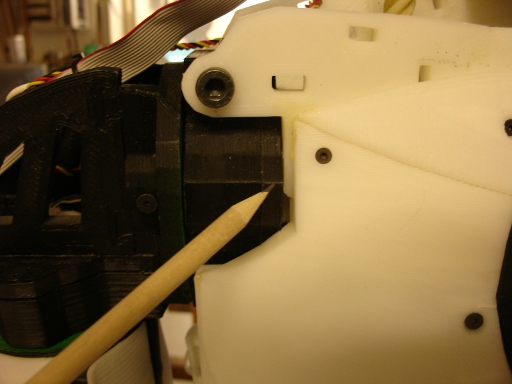
Schrauben Sie PivWorm an das Servohornrad (Teil, das mit Ihrem Servo geliefert wird). Stellen Sie sicher, dass PivWorm gut im PivCenter sitzt und manuell rotieren kann. Außerdem sollten die Schrauben nicht die Kante berühren, auf die ich mit meinem linken Zeigefinger zeige.

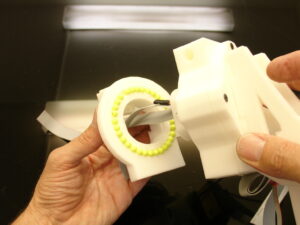
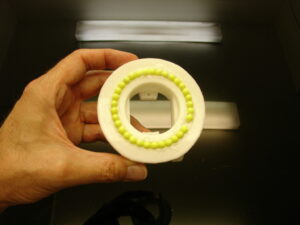
Fett hinzufügen. Seien Sie vorsichtig mit der Art des Fetts, das Sie verwenden. Manches Fett färbt die bedruckten Teile oder löst sogar die BBGun-Kugeln auf. Das weiße Fett, das Sie auf diesem Bild sehen, erwies sich bei den BBGun-Kugeln aus Kunststoff als schrecklich. Ich musste alle Kugeln durch Stahlkugeln ersetzen.
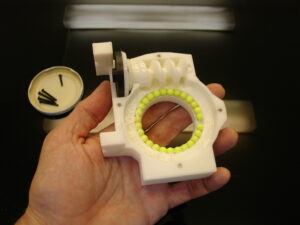
Fügen Sie die Kugeln hinzu. Hier benötigen Sie insgesamt 27 Bälle.
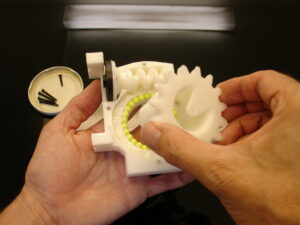
PivGear einsetzen.
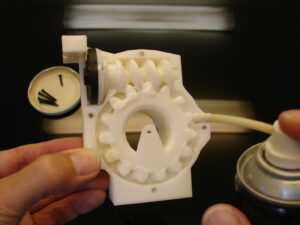
Tragen Sie überall auf den Zähnen mehr Fett auf. Sehen Sie, wie PivGear auf meinem Bild positioniert ist. Stellen Sie sicher, dass es in diese Richtung gedreht wird, wenn wir später das Potentiometer hinzufügen.
Mounten Sie PivTit.
Schrauben Sie PivTit mit 3-mm-Schrauben an PivCenter. Um die Mutter auf der anderen Seite des PivCenters zu erreichen, verwende ich Sechskantschrauben mit einer Länge von 35 mm.

Diese Schraube muss kürzer sein (maximal 20 mm), damit sich die 8-mm-Welle frei drehen kann. (Chromwelle in diesem Bild)
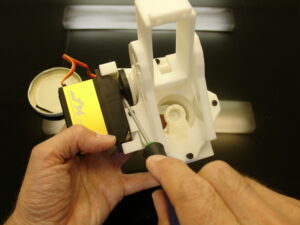
Aktivieren Sie das Servo am Servohornrad. Stellen Sie sicher, dass es vollständig eingerastet ist. Einige Hörner sind etwas unangenehm und lassen sich manuell nur schwer eindrücken. Also mach nichts kaputt. Wie Sie in diesem Tutorial sehen, verwende ich ein anderes Servomodell als das HS805BB und es war wirklich schwierig, es einzupressen.

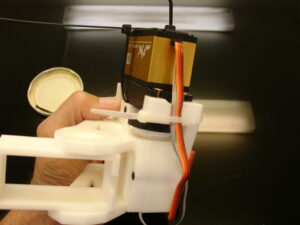
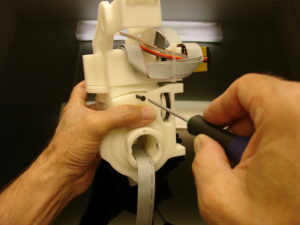
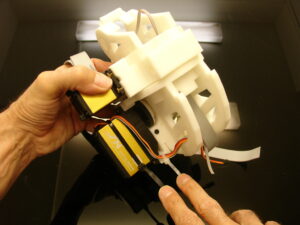
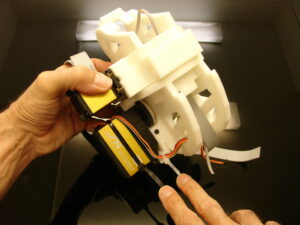
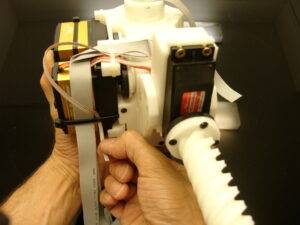
Bereiten Sie einen Kabelbinder vor und befestigen Sie ihn um das Servo herum. Sehen Sie sich an, wie und wo der Reißverschlussverbinder platziert wird. Es ist wichtig, bei der weiteren Montage dasselbe zu tun. Ziehen Sie den Kabelbinder noch nicht ganz fest, wir werden später durch die Bänder und Kabel gehen.

Jetzt können Sie die 4 Schrauben hinzufügen, um das Servo zu befestigen. Ich verwende Standard-Philips-Holzschrauben von 3,5 x 16 mm, es passen aber auch andere Größen.
Setzen Sie wie gezeigt einen weiteren Kabelbinder ein.
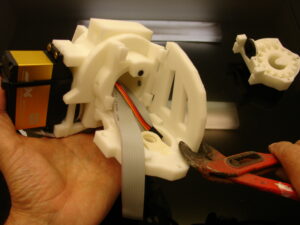
Führen Sie beide Kabel durch, die von Ihrem Potentiometer ausgehen (Servo- und Potentiometer-Erweiterung). Sie können den Kabelbinder festziehen. Achten Sie dabei auf die auf dem Bild gezeigte Position. Schneiden Sie den Rest vom Kabelbinder ab.
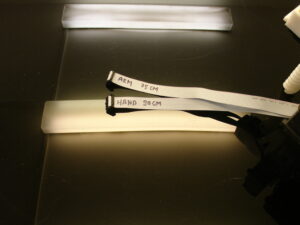
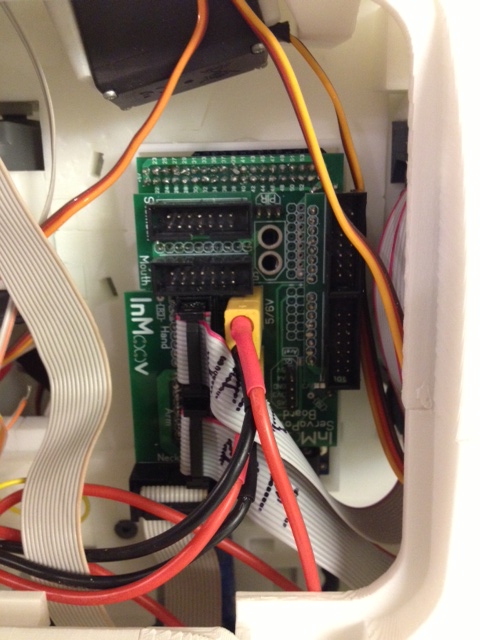
Nun bereiten wir die Flachbandkabel für Arm und Hand vor und schneiden sie ab. Die benötigte Länge können Sie auf den Bändern vermerken. Korrigieren Sie die Header noch nicht!

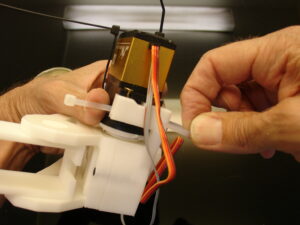
Falten Sie beide Bänder auf ca. 30 cm und führen Sie sie durch den schwarzen Kabelbinder. Beachten Sie auf meinem Bild, wie die rote Auskleidung (Vcc+) des Bandes eingestellt ist.
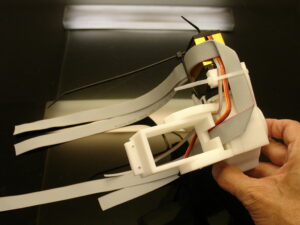
Falten Sie die Bänder erneut und führen Sie sie durch den zweiten weißen Kabelbinder. Falten Sie die Bänder noch einmal und führen Sie sie wie auf dem Bild gezeigt nach unten.
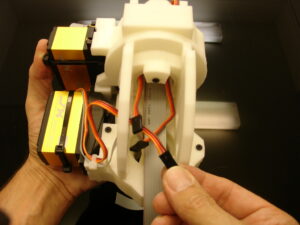
Führen Sie nun beide Bänder und das Servokabel wie gezeigt durch PivGear.
Hier sehen Sie, dass ich das Kabel für das Potentiometer in der Hand halte, das nicht durch PivGear laufen muss. (Zur Info: Wenn ich das extrahierte Potentiometer vorbereite, füge ich eine 35 cm lange Kabelverlängerung hinzu, was, wie Sie sehen können, völlig ausreicht.)

Von der anderen Seite sollte es so aussehen.
Holen Sie sich einen PivMit-Teil.

Tragen Sie Fett auf PivMit im Kugelgelenk auf.

31 Kugeln hinzufügen.
Setzen Sie PivGear in PivMit ein, wie auf dem Bild gezeigt. Achten Sie darauf, es nicht auf den Kopf zu stellen.
Fügen Sie eine 3-mm-Schraube mit einer Länge von 30 mm hinzu, OHNE sie festzuziehen, um die Mutter zu erreichen. Mit dieser Schraube wird der Druck auf das Kugellager eingestellt.

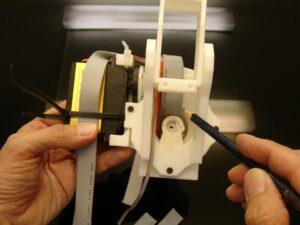
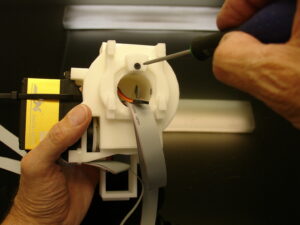
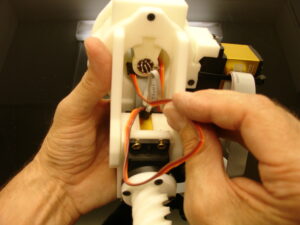
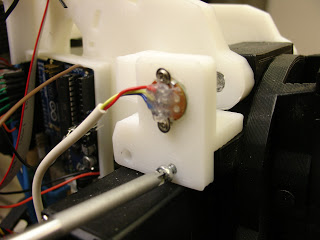
Jetzt können wir das Kabel an das Potentiometer montieren und anlöten. Beachten Sie die leicht gedrehte Position meines Potentiometers. Ihre sollte ungefähr gleich sein. Später müssen Sie möglicherweise die Position neu anpassen.

Bereiten wir RotCenter mit Fett und 27 Bällen vor. Bereiten wir auch RotWorm vor, der auf das Servohornrad geschraubt ist.
Fügen wir RotGear und Fett hinzu. Beachten Sie die Position von RotGear auf meinem Bild.
Montieren Sie RotTit wie in PivMit gezeigt. Ziehen Sie die Einstellschraube nicht zu fest an, sie dient nur dazu, den Druck auf das Kugellager einzustellen. Drücken Sie PivPotentioRound in RotTit.
Montieren Sie den PivConnector und drücken Sie ihn mit einer Zange fest. Falls die Montage sehr schwierig ist, können Sie die Teile mit einer Heißluftpistole vorsichtig anfeuchten. (Bei einem gut kalibrierten Drucker passen die Teile einfach perfekt)
Montieren Sie den zweiten PivConnector. Kleben Sie alle vier Teile mit Aceton zusammen und machen Sie es gut, das erfordert viel Druck.
Montieren Sie RotCenter wie gezeigt an der gesamten Baugruppe. Stellen Sie sicher, dass sich RotGear immer noch in der richtigen Position befindet (siehe Abbildung).
Führen Sie eine 3-mm-Schraube mit einer Länge von 30 mm durch die Unterseite des RotCenters ein, um die Mutter auf der anderen Seite zu erreichen.

Fügen Sie die anderen drei Schrauben mit einer Länge von 3 mm und 30 mm oben hinzu, wie gezeigt.

Fügen Sie die vier Standard-Holzschrauben 3,5 mm x 16 mm hinzu und ziehen Sie sie fest.
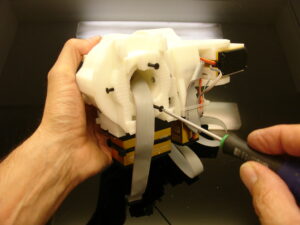
Bringen Sie wie abgebildet einen Reißverschluss (schwarz) über den beiden Kabeln an, die aus dem Servo herauskommen. Schneiden Sie die überschüssige Länge des Kabelbinders ab.
Befestigen Sie einen zweiten Reißverschluss (weiß), um die Kabel zu halten, und führen Sie sie wie gezeigt durch PivConnector. Schneiden Sie die überschüssige Länge des Kabelbinders ab.
Fügen Sie das Potentiometer hinzu und löten Sie es. Stellen Sie sicher, dass es wie meins montiert ist. Später müssen Sie möglicherweise die Drehung anpassen.

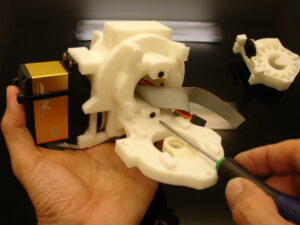
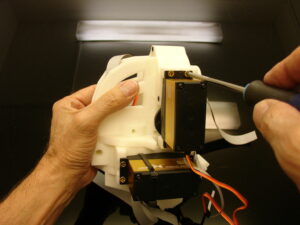
Schneiden Sie die Kante mit einer Klinge am ServoHolster ab, um das Einsetzen des Servomotors zu erleichtern. Je nach Modell des Servomotors kann das Einschieben etwas schwierig sein.

Fügen Sie die vier Standard-Holzschrauben 3,5 mm x 16 mm hinzu und ziehen Sie sie fest.

Montieren Sie das Servohornrad am Servomotor und befestigen Sie die mit Ihrem Servo gelieferte 3-mm-Schraube. Ziehen Sie diese fest an, da sich diese Schraube mit der Zeit lockern kann.

Montieren Sie PistonClavi am Servohornrad. Ich verwende vier Sechskantschrauben von 3 mm und einer Länge von 12 mm, Sie können aber auch einige kleine Holzschrauben verwenden.
Führen Sie das Servokabel in PivGear ein.
Wenn alles in Ordnung ist, sollten sich jetzt die drei Servokabelanschlüsse an derselben Stelle befinden.

Führen Sie das dritte Potentiometerkabel wie abgebildet durch den Reißverschluss (weiß).
Führen Sie das dritte Potentiometerkabel weiter durch den zweiten Kabelbinder (schwarz), wie gezeigt.

Platzieren Sie den PotHolder wie abgebildet, montieren und löten Sie das dritte Potentiometer mit einem ähnlichen Winkel wie auf meinem Bild. (Um den Topfhalter später zu befestigen, müssen wir zwei Schrauben entfernen, die den Servomotor halten.)

Auch später, wenn alle Potentiometer gut kalibriert sind, empfiehlt es sich, das Potentiometer-Lötmittel mit etwas Heißkleber (Heißklebepistole) zu schützen. Aber Sie werden das tun, wenn Sie sicher sind, dass alles gut funktioniert. Zur Info: Wenn Sie Heißkleber entfernen möchten, ist es am besten, etwas Alkohol darauf zu streichen, dann lässt er sich leicht entfernen.

Fügen Sie die beiden seitlichen Schrauben 3 mm und 20 mm Länge hinzu. Nicht zu fest anziehen, sonst könnte etwas kaputt gehen.

Bereiten wir das RotMit-Teil vor.
Beachten Sie, dass auf RotMit FRONT steht. Dies gibt Ihnen die Möglichkeit, es zu RotGear zusammenzubauen.
Fett und 31 Kugeln hinzufügen.

Zusammenbau mit RotGear.
Fügen Sie die beiden Einstellschrauben einer 3-mm-Schraube mit einer Länge von 30 mm hinzu. Nicht zu eng anziehen. Diese Schrauben dienen lediglich dazu, den Druck auf das Kugellager einzustellen.
Fügen Sie die beiden seitlichen Schrauben von 3 mm und einer Länge von 20 mm hinzu und schrauben Sie sie fest. Achten Sie darauf, dass sie nicht länger nach innen stehen. Dies ist wichtig, da sonst der Kolben des Bizeps beschädigt werden könnte.

RibbonPusher einsetzen.
Wie Sie sehen, dient dies nur dazu, das Flachbandkabel festzuhalten, um Reibung am Kolben des Bizeps zu vermeiden.

Befestigen Sie die Schulter an den Clavi-Teilen mit einer 8 mm langen Schraube mit einer Länge von 90 mm. (Kein Problem mit dem Flachbandkabel, es handelt sich um ein älteres Bild)
Befestigen Sie die Bizepsteile an den Schulterteilen, wenn Sie diese bereit haben.
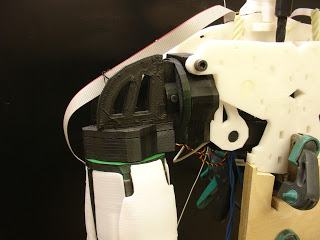
Befestigen Sie auf der Rückseite der Schulter den ersten Teil von „PivPotHolder“ an „ClaviBack“.
In Ihrem Fall hat PivPotHolder ein Mutterngehäuse für 8-mm-Muttern. (Auf dem Bild oben ist es ein älteres Modell)
Entfernen Sie die beiden Schrauben, mit denen das Servo befestigt ist, und setzen Sie den zweiten Teil des „PivPotHolder“ ein.

Verwenden Sie längere Schrauben, um durch die Servolöcher zu gehen.
Verbinden Sie die beiden Bänder mit Ihren NervoBoards jeweils am Arm und an der Hand.Sie sind nun bereit für Ihren ersten Test. Beachten Sie, dass das Servo, das „PistonClavi“ betätigt, zwischen der 0- und 80-Position bleiben sollte. Wenn Sie weiter gehen, wird es mit Sicherheit kaputt gehen. Wenn Sie nun den InMoov-Dienst von Myrobotlab nutzen, ist dieser bereits implementiert, um Schäden zu vermeiden. Denken Sie daran, den Test in einem großen Raum durchzuführen und Ihre Kabel zu überprüfen, damit sie nicht abreißen.
Tipp zum Testen: Persönlich teste ich Servo für Servo jede Position, bevor ich die gesamte Schulter starte. Dazu ziehe ich einfach die Servokabel ab, die ich nicht mit Strom versorgen möchte, von der Arm-Minibreakout-Platine.
Abschnitt 4:
Einrichten der Schulter in die Standardposition.
„Omoplate“-Servo und Potentiometer auf die Standard-„Ruhe“-Position 10 in einem Bereich von 0 bis 180 einstellen.
Um diesen Wert zu erreichen, müssen Sie möglicherweise Ihr Potentiometer in seiner Halterung leicht drehen.
Wenn sich Omoplate in der Standardposition 10 befindet, gibt es keine Lücke zwischen diesen beiden Teilen

Sehen Sie sich das Video zur Omoplate-Bewegung an:
Das Video ist hier!
Stellen Sie das „Schulter“-Servo und das Potentiometer auf Position 33 in einem Bereich von 0 bis 180 ein. Dies ist nicht die Standardposition für „Ruhe“, aber auf diese Weise können wir die beiden Servos von der Rückseite des InMoov aus ausrichten.
Um diesen Wert zu erreichen, müssen Sie möglicherweise Ihr Potentiometer in seiner Halterung leicht drehen.
Siehe Video zur Schulterbewegung:
das Video ist hier!
„Drehen“-Servo und Potentiometer auf die Standard-Ruhestellung 90 in einem Bereich von 0 bis 180 einstellen.
Richten Sie die Teile wie auf den Bildern gezeigt aus.
Um diesen Wert zu erreichen, müssen Sie möglicherweise Ihr Potentiometer in seiner Halterung leicht drehen.


Sehen Sie sich das Video der Servobewegung „Drehen“ an: Das Video ist hier!
Schreibe einen Kommentar