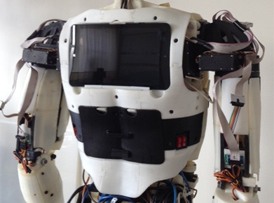
In diesem Tuto wird erläutert wie man das Rücken Gehäuse für Alex zusammenbaut.
Basisinformationen:
Für den Druck der 3D-Modelle verwenden wir diesen Drucker.
Um den Druck gewährleisten zu können, sollten folgende Informationen beachtet werden!
Für die Filament Beschaffung können diese Posts eventuell sehr hilfreich sein.
Eine Füllung von 30 %, Wandstärke 2,5 mm, am besten ohne Steg, ohne Stütze (sofern nicht anders angegeben), bei großen Teilen eine Krempe verwenden, um Verformungen zu vermeiden.
Hier ist die Liste der Teile und die Anzahl der benötigten Drucke für die Rückseite:
– 1x BackClaviHolder (support) Filament: 18 g Druckzeit: 0:48 Std.
– 1x BackCoverBottomLeft (support) Filament: 44 g Druckzeit: 0:47 Std.
– 1x BackCoverBottomRight (support) Filament: 44 g Druckzeit: 0:46 Std.
– 1x BackCoverBottomMid (support) Filament: 31 g Druckzeit: 1:27 Std.
– 1x BackCoverTopLeft (support) Filament: 36 g Druckzeit: 1:29 Std.
– 1x BackCoverTopRight (support) Filament: 36 g Druckzeit: 1:36 Std.
– 1x BackCoverTopMid (support) Filament: 14 g Druckzeit: 0:46 Std.
– 1x BackCoverLowLeft (support) Filament: 35 g Druckzeit: 1:28 Std.
– 1x BackCoverLowRight (support) Filament: 35 g Druckzeit: 1:29 Std.
– 1x BackHipsLeft (support) Filament: 33 g Druckzeit: 1:26 Std.
– 1x BackHipsRight (support) Filament: 33 g Druckzeit: 1:27 Std.
– 1x BackHipsMid (support) Filament: 23 g Druckzeit: 1:01 Std.
– 1x BackHolderCenterLeft Filament: 10 g Druckzeit: 0:24 Std.
– 1x BackHolderCenterRight Filament: 25 g Druckzeit: 0:25 Std.
– 1x BackHolderCenter Filament: 16 g Druckzeit: 0:51 Std.
– 1x BackHolderLowLeft Filament: 3 g Druckzeit: 0:12 Std.
– 1x BackHolderLowRight Filament: 3 g Druckzeit: 0:12 Std.
– 1x BackSideHolderLeft Filament: 6 g Druckzeit: 0:17 Std.
– 1x BackSideHolderRight Filament: 6 g Druckzeit: 0:18 Std.
– 1x BatteryHolderLeft Filament: 28 g Druckzeit: 1:04 Std.
– 1x BatteryHolderRight Filament: 28 g Druckzeit: 1:31 Std.
– 2x BatteryPusher Filament: 1 g Druckzeit: 0:03 Std.
– 1x BackDoorRight Filament: 53 g Druckzeit: 2:07 Std.
– 1x BackDoorLeft Filament: 53 g Druckzeit: 2:08 Std.
– 1x BackDoorClip Filament: 2 g Druckzeit: 0:07 Std.
– 1x BackPower Filament: 22 g Druckzeit: 0:58 Std.
Gesamter Druckdauer : Std. Gesamt Filament-Verbrauch: g
Wenn Sie alle Teile gedruckt haben können wir nun mit dem Zusammenbau gebginnen:
Abschnitt 1:
Entfernen Sie alle Trägermaterialien von Ihren Drucken und machen Sie sie sauber!
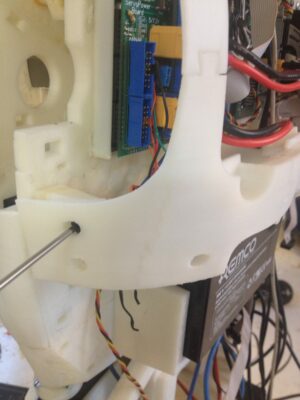
Wenn Sie vorhaben, zusätzliche Servos für den Hals zu verwenden ( Bob Houston-Upgrade ), müssen Sie Ihre Arduino- und Nervo-Boards auf den Kopf stellen, hauptsächlich weil das USB-Kabel nicht richtig positioniert ist.



Wenn Sie das Servo-Upgrade nicht nutzen möchten, können Sie zunächst alle Halter an den Rumpfplatten anbringen und festkleben.
Vielleicht möchten Sie die 3D-Skizzen überprüfen, um zu sehen, welches Teil wohin gehört!
Diese Kleinteile sollten geklebt werden. Hinweis: Die von Ihnen gedruckten Dateien werden anders aussehen, da ich sie aktualisiert habe, um die Einrichtung für zusätzliche Halsservos zu ermöglichen.
Die Mitte sollte ebenfalls verklebt werden. Wenn Ihre Teile aus ABS gedruckt sind, können Sie Aceton verwenden.

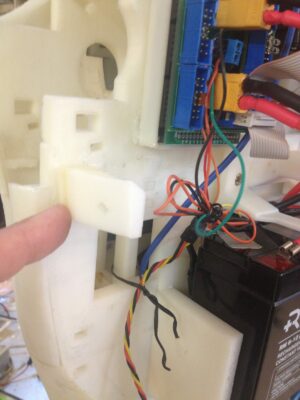
Das Gleiche gilt hier für den unteren Halter. Verwenden Sie Kleber oder Aceton
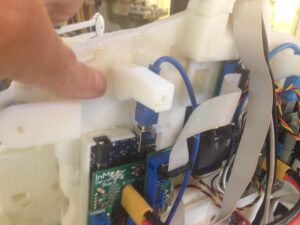
Sie müssen Schrauben hinzufügen, um die Mittelhalter zu befestigen. Es kann aber auch geklebt werden.
Abschnitt 2:


Besser ist es, die Teile direkt vor Ort zusammenzubauen, um Verformungen während der Trocknungszeit zu vermeiden. Benutzen Sie einige Klammern, um die Teile zusammenzukleben und zusammenzuhalten. Dies wird wesentlich dazu beitragen, dass die Teile richtig zusammenpassen.



Fügen Sie die Schrauben und Bolzen hinzu, um alle Teile zusammenzuhalten.


Fügen Sie weitere Teile hinzu. Diese sollten NICHT geklebt werden, da Sie so den Zugriff behalten, wenn Sie jemals Dinge hinter den Schaltern ändern möchten.

Sie haben die Möglichkeit, für verschiedene Zwecke zwei Schalter auf jeder Seite des Roboters anzubringen. Ich verwende eines als Hauptabschaltung, ein anderes dient zum Einschalten des Mini-Verstärkers. Der dritte dient dazu, die mobile Radbasis mit Strom zu versorgen, und der vierte ist derzeit frei.


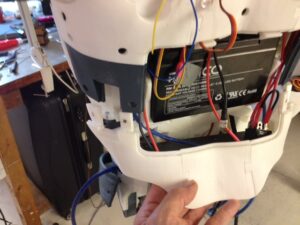
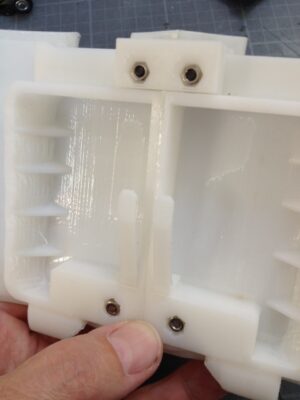
Wenn Sie die Batteriehalter der Vorgängerversion bereits ausgedruckt haben, können Sie diese sägen oder meine neue Version noch einmal ausdrucken. Die neue Version der Batteriehalter ermöglicht es Ihnen, oben dort, wo die Batterie gleitet, ein Kupferblech anzubringen. Daher kann die Batterie beim Einschieben in die Rückseite automatisch mit Strom versorgt werden, ohne dass bei jedem Batteriewechsel Kabel angeschlossen werden müssen.


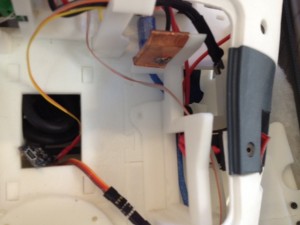

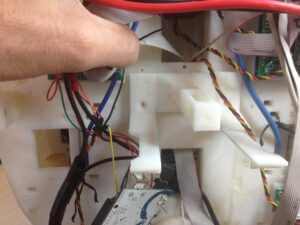
Ich habe meinen USB-Hub unten auf der Rückseite befestigt. Wie Sie sehen, handelt es sich um einen 8-Port-HUB USB3.0 . Hier hat jemand eine nette Lösung gefunden, um den USB-Hub an der Rückseite von InMoov zu befestigen .
Auf der rechten Seite (blau) ist es meine USB-Soundkarte. Oben links hängt (in Rot) die Audio-Buchse, die vom Mini-Verstärker zur USB-Soundkarte führt.

Jetzt können Sie den unteren Teil der Rückseite hinzufügen. Auch hier empfehle ich, die Teile vor Ort zu verkleben, um Verformungen zu vermeiden.
Kleben Sie den Batterieschieber in die Hintertür.

Schließen Sie das Mini-USB-OTG-Kabel an Ihr Thinkpad Lenovo 8″ Tablet an (siehe Stückliste für Teileliste) und platzieren Sie es und drücken Sie es auf die Rückseite Ihres Roboters.
Möglicherweise stellen Sie fest, dass es keine Lücke zum Anschließen des Audioausgangs gibt. Der Grund dafür ist, dass ich eine USB-Soundkarte 3.0 verwende, mit der ich den Ton an den Mini-Verstärker senden kann. Die USB-Soundkarte verfügt außerdem über einen Mikrofoneingang, was in manchen Umgebungen praktisch ist. Der gesamte Ton wird also über USB verarbeitet.
Schreibe einen Kommentar