In diesem Tuto erkläre ich, wie der Hals und der Kiefer gebaut werden.
Basisinformationen:
Für den Druck der 3D-Modelle verwenden wir diesen Drucker.
Um den Druck gewährleisten zu können, sollten folgende Informationen beachtet werden!
Für die Filament Beschaffung können diese Posts eventuell sehr hilfreich sein.
Eine Füllung von 30 %, Wandstärke 2,5 mm, am besten ohne Steg, ohne Stütze (sofern nicht anders angegeben), bei großen Teilen eine Krempe verwenden, um Verformungen zu vermeiden.
HINWEIS: Ich habe einen neuen Halsmechanismus entworfen, der hier zum Download verfügbar ist, aber im folgenden Tutorial nicht gezeigt wird.
Hier sind die Dateien, die für dieses Tuto notwendig sind:
– 1x ThroatHoleV3 Filament: 13 g Druckzeit: 0:23 Std.
– 1x ThroatHolderV2 Filament: 11 g Druckzeit: 0:19 Std.
– 1x SkullServoFixV1 Filament: 24 g Druckzeit: 0:47 Std.
– 1x ServoGearV2 Filament: 14 g Druckzeit: 0:32 Std.
– 1x RingV2 Filament: 4 g Druckzeit: 0:08 Std.
– 1x PistonBaseSideV2 Filament: 6 g Druckzeit: 0:16 Std.
– 1x NeckV2 Filament: 28 g Druckzeit: 0:46 Std.
– 1x NeckServoPivotV2 Filament: 13 g Druckzeit: 0:28 Std.
– 1x NeckServoHolderV2 Filament: 12 g Druckzeit: 0:27 Std.
– 1x NeckPlateV2 Filament: 14 g Druckzeit: 0:31 Std.
– 1x NeckPlateHighV2 Filament: 37 g Druckzeit: 1:17 Std.
– 2x NeckPistonV2 Filament: 16 g Druckzeit: 0:34 Std.
– 2x NeckPistonSideV1 Filament: 7 g Druckzeit: 0:18 Std.
– 1x NeckPistonFrontV1 Filament: 24 g Druckzeit: 0:48 Std.
– 1x NeckPistonBaseFrontV1 Filament: 14 g Druckzeit: 0:37 Std.
– 1x NeckJointLowerV4 Filament: 16 g Druckzeit: 0:25 Std.
– 1x NeckBoltsV2 Filament: 5 g Druckzeit: 0:15 Std.
– 1x MainGearV2 Filament: 11 g Druckzeit: 0:27 Std.
– 1x GearHolderV2 Filament: 20 g Druckzeit: 0:35 Std.
Falls Sie den Lautsprecher im Mund verbauen möchten hier die Datei:
– 1x SpeakerMouthHolderV2 Filament: 28 g Druckzeit: 1:06 Std.
Wir setzen voraus, dass sie diese Dateien für den Kiefer schon produziert haben, wenn nicht, entnehmen Sie diese bitte dieser Anleitung hier!

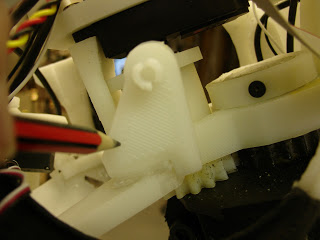
Kleben oder schrauben Sie „MainGear“ an „NeckHinge“

Verwenden Sie „GearHolder“ und stellen Sie „ServoGear“ darüber ein. Schrauben Sie das mit Ihrem HS-805BB-Servo gelieferte Stellrad an „ServoGear“.

Verwenden Sie Ihr Arduino-Board und stellen Sie Ihr HS-805BB-Servo auf 90° ein.Legen Sie es in den Plattenteller.
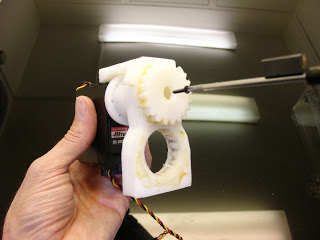
Das ist etwas knifflig, lässt sich aber mit einem Magneten an Ihrem Schraubenzieher bewerkstelligen. Mit der dem Servo beiliegenden Schraube müssen Sie den Drehteller am Servo im Inneren von „ServoGear“ festschrauben. Halten Sie Ihr Servo auf 90°.

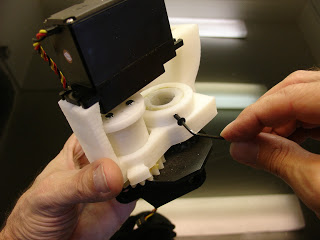
Befestigen Sie diese Baugruppe an der Baugruppe „MainGear“ und „NeckHinge“ und verwenden Sie etwas Fett, um die Drehung zu erleichtern. „GearHolder“ sollte mit „NeckHinge“ ausgerichtet sein und Ihr Servo sollte sich immer noch auf 90° befinden.

Befestigen Sie „LowBackRight“ und „LowBackLeft“ oder „Temporary“ an „GearHolder“. Dies wird die Rückseite des Schädels sein.
Schrauben Sie „Ring“ an „MainGear“. Versuchen Sie, Spiel zwischen den Teilen zu vermeiden.

Benutzen Sie Ihre Lieblingszange, um „FaceHolder“ zu montieren.Sie können beide montieren.
Jetzt bauen wir den Kiefer. Nehmen Sie „JawPiston“ und drehen Sie ihn in „JawHinge“, bis zwischen ihnen ein Abstand von 1 cm entsteht.

Befestigen Sie diese Schraube am Drehteller Ihres HK15298 oder eines ähnlichen Servos. Stellen Sie Ihr Servo mit der Arduino-Karte auf 0° ein. Unter Beibehaltung des Versatzes von 1 cm sollte „JawHinge“ im 90°-Winkel zum Servo montiert werden.


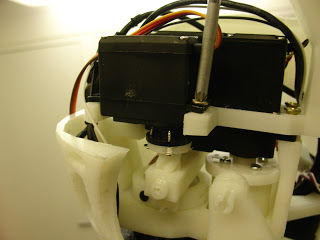
Montieren Sie die Schraube „SkullServoFix“ über dem HS-805BB-Servo.
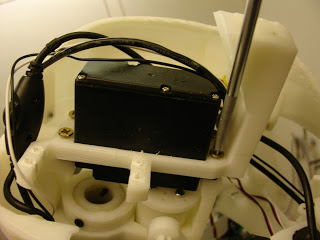
Setzen Sie alle 4 Schrauben ein. Machen Sie sich nichts aus den Kabeln auf meinen Bildern, sie stammen von Kameras.

Kleben Sie die beiden „JawHolder“ auf beiden Seiten der gesamten Baugruppe mit Aceton fest. Es kommt/passt auf die „FaceHolders“

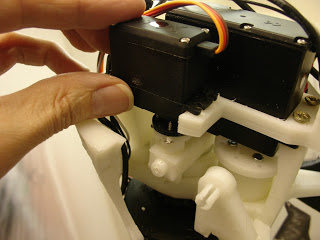
Nehmen Sie nun Ihre HK15298-Baugruppe und schieben Sie sie hindurch.
Setzen Sie alle 4 Schrauben ein, um Ihr HK15298-Servo zu befestigen.

Entfernen Sie die Vorstütze von „Jaw“. Mein auf diesem Bild gezeigter „Kiefer“ ist nur ein halber Teil. Es war ein früherer Testdruck, den ich gemacht habe. Ihr „Kiefer“ ist ein einteiliger Druck.

Schrauben Sie „Jawsupport“ an „Jaw“. Stellen Sie sicher, dass die flachen Flächen der „Jawsupport“ innen liegen.

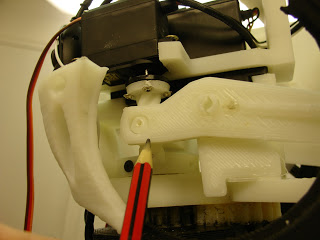
Fix in „ThroatHole“. Meine sieht anders aus als deine. Entschuldigung für dieses Bild, aber „ThroatPiston“ und „ThroatPistonBase“ sollten noch nicht montiert sein, sie kommen in den nächsten Schritten.

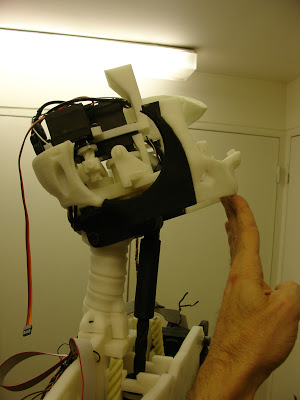
Schrauben Sie „Hals“ an „ThroatHole“.

Befestigen Sie „NeckHinge“ mit einer 8-mm-Schraube am „Neck“ (oder drucken Sie eine von Hand aus).Vorausgesetzt, Sie haben Ihr HS-805BB-Servo bereits in der Torso-Baugruppe befestigt. Stellen Sie Ihr Servo mit der Arduino-Karte auf 90° ein. Drehen Sie „ThroatPiston“ und „ThroatPistonBase“ so, dass „NeckHinge“ gerade und flach wird.

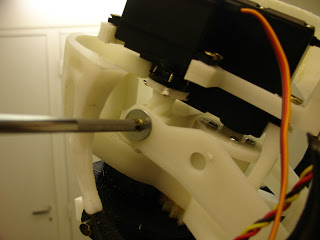
Schrauben Sie „ThroatPiston“ auf den Drehteller und halten Sie Ihr Servo im 90°-Winkel.
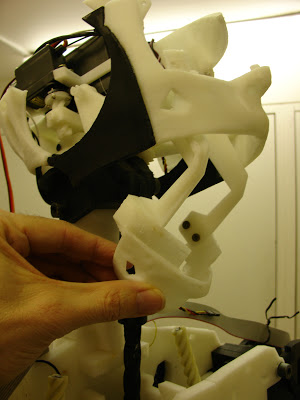
Befestigen Sie „ThroatPistonBase“ mit einer 8-mm-Schraube an „NeckHinge“ (oder drucken Sie eine von Hand aus).Jetzt sollte sich der gesamte Kopf auf und ab bewegen können, wenn sich das Servo von 0 auf 180 dreht. Machen Sie einen Test mit dem Arduino. Führen Sie diesen Test sorgfältig durch.
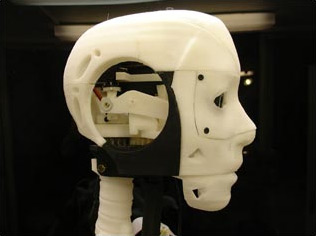
Lassen Sie den Kopf oben und schieben Sie die Backenbaugruppe in den Kopf.

Führen Sie die „JawSupports“ durch und montieren Sie sie an den „JawHinges“ und „JawHolders“.

Setzen Sie die Schrauben mit Unterlegscheiben ein. Führen Sie mit Arduino einen Test des Backenmechanismus durch.
ACHTUNG: Das Backenservo kann nur von 0 auf 20° gedreht werden (glaube ich), bei mehr kann es zu Beschädigungen kommen. Bitte führen Sie zur Überprüfung Ihren eigenen Test durch. (Im Moment, in dem ich das schreibe, weiß ich nicht genau, wie viel meines Kosten könnte. Wenn ich es wieder einstecke, werde ich das korrigieren) Im „Neck“ können Sie die Kabel Ihrer Servos verlegen. Jetzt sollten Sie darauf eingestellt sein, den Kopf und den Kiefer durch Ihr Arduino zu bewegen. Überprüfen Sie auf die Pin-Verbindung, um diese Ihrem Roboter hinzuzufügen.
Schreibe einen Kommentar