In diesem Teil der Anleitung erläutere ich, wie Sie einen Oberarm für Alex bauen können.

Basisinformationen:
Für den Druck der 3D-Modelle verwenden wir diesen Drucker.
Um den Druck gewährleisten zu können, sollten folgende Informationen beachtet werden!
Für die Filament Beschaffung können diese Posts eventuell sehr hilfreich sein.
Hilfe & Anleitung Videos findest du hier
Eine 3D Sketchup Ansicht ist hier zu finden.
Hier ist eine 3D Bildersammlung der Oberarm Baugruppe
Druckanweisung:
Eine Füllung von 30 %, Wandstärke 2,5 mm, am besten ohne Steg, ohne Stütze, bei großen Teilen eine Krempe verwenden, um Verformungen zu vermeiden.
Download STL-Files für den Rechten Oberarm:
– Getriebehalter Filament: PETG Farbe: Schwarz Verbrauch: 2 g Druckzeit: 0:06 Std.
– 2x Ober Arm Oben Filament: PETG Farbe: Schwarz Verbrauch: 50 g Druckzeit: 1:21 Std.
– Kolbenantitakt Filament: PETG Farbe: Schwarz Verbrauch: 21 g Druckzeit: 1:13 Std.
– Kolbenbasis Filament: PETG Farbe: Schwarz Verbrauch: 15 g Druckzeit: 0:43 Std.
– Getrieberotation Filament: PETG Farbe: Schwarz Verbrauch: 27 g Druckzeit: 1:03 Std.
– Getriebemitte Filament: PETG Farbe: Schwarz Verbrauch: 40 g Druckzeit: 1:17 Std.
– 2x Potihalter runt / eckig Filament: PETG Farbe: Schwarz Verbrauch: 6 g Druckzeit: 0:14 Std.
– Getriebedeckel Filament: PETG Farbe: Schwarz Verbrauch: 29 g Druckzeit: 0:53 Std.
– Antrieb Filament: PETG Farbe: Schwarz Verbrauch: 12 g Druckzeit: 0:33 Std.
– Getriebe Center Filament: PETG Farbe: Schwarz Verbrauch: 2 g Druckzeit: 0:06 Std.
– Armabdeckung 1 Filament: PETG Farbe: Schwarz Verbrauch: 42 g Druckzeit: 1:57 Std.
– Armabdeckung 2 Filament: PETG Farbe: Schwarz Verbrauch: 29 g Druckzeit: 1:28 Std.
– Armabdeckung 3 Filament: PETG Farbe: Schwarz Verbrauch: 65 g Druckzeit: 2:55 Std.
– Zahnrad Filament: PETG Farbe: Schwarz Verbrauch: 2 g Druckzeit: 0:05 Std.
– 2x Ober Arm Unten Filament: PETG Farbe: Schwarz Verbrauch: 44 g Druckzeit: 1:20 Std.
– 2x Seiten Teile Filament: PETG Farbe: Schwarz Verbrauch: 20 g Druckzeit: 0:38 Std.
– Servo Basis Filament: PETG Farbe: Schwarz Verbrauch: 18 g Druckzeit: 0:31 Std.
– Servo Halterung Filament: PETG Farbe: Schwarz Verbrauch: 20 g Druckzeit: 0:52 Std.
– Abstandshalter Filament: PETG Farbe: Schwarz Verbrauch: 5 g Druckzeit: 0:10 Std.
– Elenbogen Filament: PETG Farbe: Schwarz Verbrauch: 13 g Druckzeit: 0:25 Std.
Filament-verbrauch : 462 g Druckzeit: 18 Std.
Download STL-Files für den Linken Oberarm:
– Getriebehalter Filament: PETG Farbe: Schwarz Verbrauch: 2 g Druckzeit: 0:06 Std.
– 2x Ober Arm Oben Filament: PETG Farbe: Schwarz Verbrauch: 50 g Druckzeit: 1:21 Std.
– Kolbenantitakt Filament: PETG Farbe: Schwarz Verbrauch: 21 g Druckzeit: 1:13 Std.
– Kolbenbasis Filament: PETG Farbe: Schwarz Verbrauch: 15 g Druckzeit: 0:43 Std.
– Getrieberotation Filament: PETG Farbe: Schwarz Verbrauch: 27 g Druckzeit: 1:03 Std.
– Getriebemitte Filament: PETG Farbe: Schwarz Verbrauch: 40 g Druckzeit: 1:17 Std.
– 2x Potihalter runt / eckig Filament: PETG Farbe: Schwarz Verbrauch: 6 g Druckzeit: 0:14 Std.
– Getriebedeckel Filament: PETG Farbe: Schwarz Verbrauch: 29 g Druckzeit: 0:53 Std.
– Antrieb Filament: PETG Farbe: Schwarz Verbrauch: 12 g Druckzeit: 0:33 Std.
– Getriebe Center Filament: PETG Farbe: Schwarz Verbrauch: 2 g Druckzeit: 0:06 Std.
– Armabdeckung 1 Filament: PETG Farbe: Schwarz Verbrauch: 42 g Druckzeit: 1:57 Std.
– Armabdeckung 2 Filament: PETG Farbe: Schwarz Verbrauch: 29 g Druckzeit: 1:28 Std.
– Armabdeckung 3 Filament: PETG Farbe: Schwarz Verbrauch: 65 g Druckzeit: 2:55 Std.
– Zahnrad Filament: PETG Farbe: Schwarz Verbrauch: 2 g Druckzeit: 0:05 Std.
– 2x Ober Arm Unten Filament: PETG Farbe: Schwarz Verbrauch: 44 g Druckzeit: 1:20 Std.
– 2x Seiten Teile Filament: PETG Farbe: Schwarz Verbrauch: 20 g Druckzeit: 0:38 Std.
– Servo Basis Filament: PETG Farbe: Schwarz Verbrauch: 18 g Druckzeit: 0:31 Std.
– Servo Halterung Filament: PETG Farbe: Schwarz Verbrauch: 20 g Druckzeit: 0:52 Std.
– Abstandshalter Filament: PETG Farbe: Schwarz Verbrauch: 5 g Druckzeit: 0:10 Std.
– Elenbogen Filament: PETG Farbe: Schwarz Verbrauch: 13 g Druckzeit: 0:25 Std.
Filament-verbrauch : 462 g Druckzeit: 1:28 Std.
Einen besseren Poti Halter findest du hier!
Für neuere HS-805BB Servos diesen Halter versuchen!
Für Eckige Potis am Oberarm diesen Downlaod verwenden!!
Benötigte Technik und Materialien für diesen Fertigungsabschnitt:
– 1 x Sekundenkleber / Komponenten Kleber
– 1 x Fett / Schmiermittel
– 4 x 3 mm x 2 cm große Schrauben für die Getriebe
– 2 x Servo Hitec HS-805BB
– Stahlkugeln, 6 Millimeter, Sector, Kohlenstoffstahl, 500 Stück für Kugellager
– 2 x 1 Stück Edelstahlschraube (Torx/Innensechskant): M5 x 25mm
– 2 x 1 Stück M5 Edelstahlmutter (schmale Bauweise)
– 2 x 1 Stück Edelstahlschraube (Torx/Innensechskant): M5 x 75mm
– 2 x 1 Stück M5 Edelstahlmutter
Informationen:
Ich habe versucht, dies so einfach wie möglich zu gestalten, und hoffe, dass Sie hier Antworten auf Ihre Fragen finden. Sobald Sie die Teile gedruckt haben, können Sie mit dem Auftrag beginnen. Auf diesen Bildern habe ich den linken Arm zusammengebaut. Berücksichtigen Sie dies also, wenn Sie den rechten Arm bauen.
Abschnitt 1
Hilfe Videos für den Servo Hack finden Síe hier!
Eine PDF für einen anderen Servo Hack ist hier zu finden!
Was wir in diesem ersten Tuto tun wollen, ist, das Potentiometer der beiden Servos zu extrahieren und durch Schweißen zusätzliche Kabellänge hinzuzufügen:

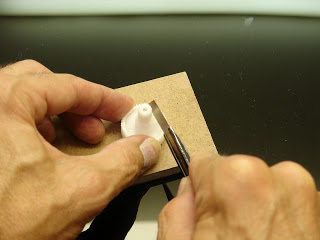
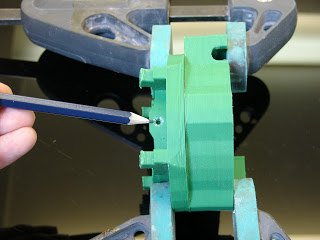
Wir beginnen mit dem Öffnen des Hitec HS-805BB-Servos, indem wir alle Schrauben an der Unterseite lösen. Es ist in drei Abschnitte unterteilt. Stellen Sie sicher, dass Sie an einem sauberen Ort arbeiten, damit nichts verloren geht und das darin enthaltene Fett verdirbt. Sobald die Oberseite abgenommen ist, notieren Sie sich die Platzierung der einzelnen Zahnräder oder machen Sie ein Foto davon und prüfen Sie, ob zwei fast gleich aussehen (siehe Abbildung).

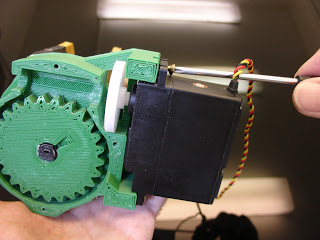
Entfernen Sie das Lager und seine Ringe (Reihenfolge beachten). Es kann etwas schwierig sein, es zu entfernen. Ich habe einen kleinen Schraubenzieher verwendet, der unter dem Lager angebracht ist.

Jetzt wollen wir die Platine und den Motor entfernen. Bei manchen Servos war das ganz einfach, aber um den Motor herum ist etwas Kleber, sodass Sie den Motor nach unten drücken können, indem Sie auf das kleine Metallzahnrad an der Spitze des Servos drücken Schraubendreher.

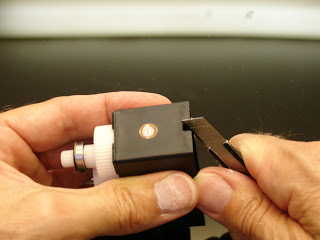
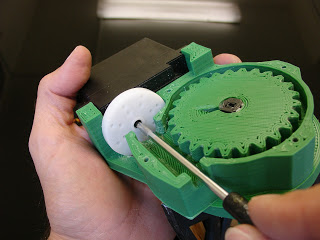
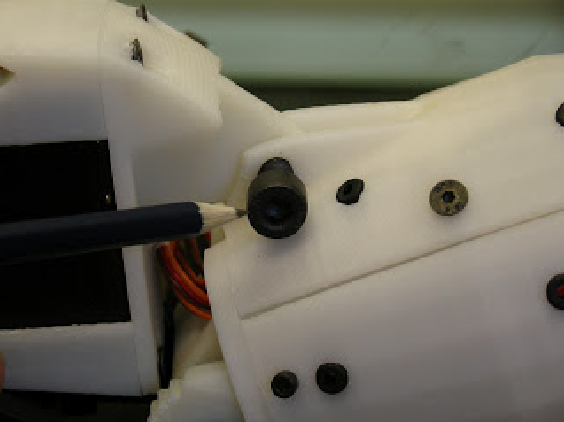
Aaah, es kam heraus, schrauben Sie das Potentiometer ab, um es herauszulösen, siehe nächstes Bild.

Bedienen Sie sich erneut mit Ihrem kleinen Schraubenzieher, der unter dem großen Zahnrad platziert ist.

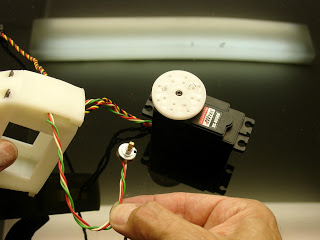
Entfernen Sie die Kunststoffscheibe (wir werden sie nicht mehr brauchen, aber behalten Sie sie, man weiß nie …)
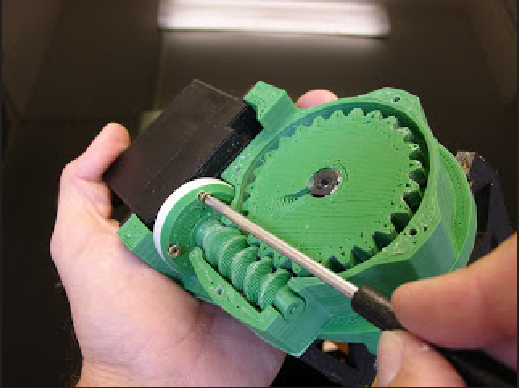
Das ist etwas schwierig. Schneiden Sie den „Stopper“ mit einem Messer oder einer Zange durch, ABER BESCHÄDIGEN SIE DAS ZAHNRAD NICHT.
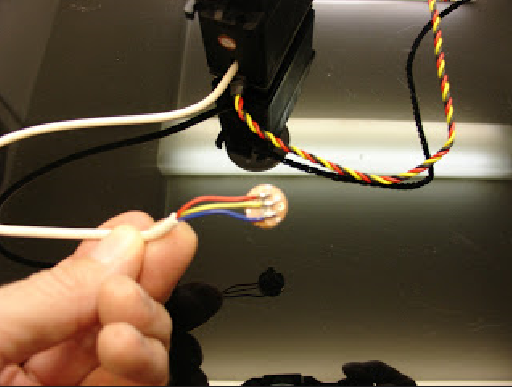
Montieren Sie alle Zahnräder wieder an ihrem ursprünglichen Platz. Schaffen Sie mit Ihrem Messer eine größere Öffnung für die überlangen Kabel. Achten Sie beim Ablöten der Kabel von der Platine und dem Potentiometer auf die Farben. (Bei meinem ersten Servo war das nicht der Fall, ich ging zehn Minuten lang ans Telefon, und als ich zum Schweißen zurückkam, konnte ich mich nicht mehr an die Farben erinnern … Dadurch wurde das Servo dauerhaft beschädigt, 30 Euro im Müll, Aaargh)
Before welding the potentiometer of the low part of bicep, run your cables in the gap of “servoholderV1”.
Wichtiger Hinweis: Löten Sie die Potentiometerdrähte nicht von der Platine des Servos ab, sondern schneiden Sie sie einfach ab und löten Sie die benötigte Überlänge an. Einige Hersteller haben berichtet, dass sie keine funktionierenden Servos hatten, nachdem sie direkt auf den PCB-Controller gelötet hatten. Einige Komponenten reagieren möglicherweise sehr empfindlich auf die Temperatur.
Für den unteren Teil des Bizepsservos sollten Ihre Kabel in der gleichen Farbreihenfolge wie beim Öffnen des Servos verschweißt werden. Ihre Kabel sollten etwa 25/30 cm lang sein. Jetzt geht es an den Zusammenbau der Teile.
Abschnitt 2:

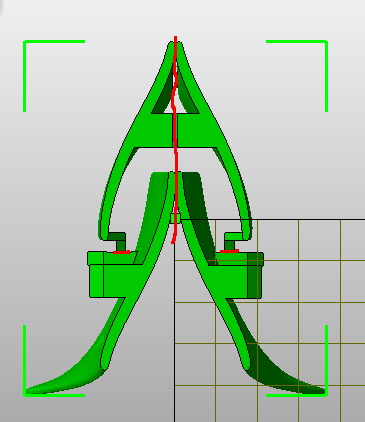
Dieses Bild soll Ihnen die Winkelposition von „rotgearV1“ im Vergleich zu „rotmitV1“ zeigen. Überprüfen Sie das kleine rechteckige Loch.
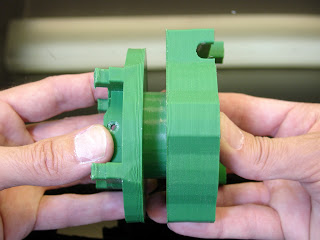
Behalten Sie also den gleichen Drehwinkel bei und montieren Sie „rotmitV1“ an „rotgearV1“. (Beziehen Sie sich für den Blickwinkel nicht auf dieses Bild, da Teile, die Sie heruntergeladen haben, nicht mehr dieselben sind.)
Ich habe Klammern verwendet, um sicherzustellen, dass es beim Verschrauben zwischen allen drei Teilen kein Spiel gibt. Stellen Sie sicher, dass Ihre Schrauben nicht nach hinten herausragen, oder schneiden Sie sie nach. (Beziehen Sie sich für den Blickwinkel nicht auf dieses Bild, da Teile, die Sie heruntergeladen haben, nicht mehr dieselben sind.)
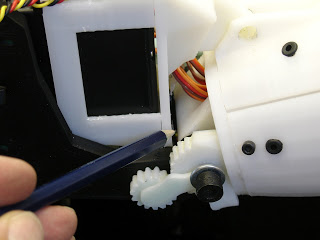
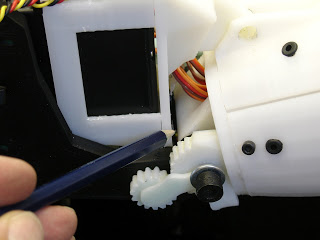
Befestigen Sie ein Servo an „rotcenterV1“. Dazu: das weiße Betätigungsrad montieren, aber nicht festsitzen.
Sobald das Servo befestigt ist, können Sie die Schraube festziehen.
Befestigen Sie „rotwormV4“ mit 4 kleinen Schrauben am Aktuator. Achten Sie darauf, dass diese nicht hinter dem Aktuator herauskommen, sonst müssen Sie sie abschneiden. Montieren Sie „rotgearV2“ an „rotcenterV2“, es sollte sich leicht, aber ohne Spiel drehen lassen. Ich ließ ihn ein paar Umdrehungen laufen, indem ich das Servo an den Arduino anschloss. Anschließend habe ich den von den Teilen erzeugten Staub entfernt. Bevor Sie das Gehäuse mit „rotTitV1“ verschließen, tragen Sie überall auf den Zahnrädern ausreichend Fett auf.

Wenn Sie den linken ROTATE-Arm bauen, sollten Ihre Kabel in der gleichen Farbreihenfolge wie beim Öffnen des Servos verschweißt werden.
Wenn Sie den rechten ROTATE-Arm bauen, sollten Ihre Kabel in der umgekehrten Farbreihenfolge wie beim Öffnen des Servos verschweißt werden.

Montieren Sie das Potentiometer an „rotpotentioV2“, aber achten Sie darauf, die kleine Metallplatte des Potentiometers in den dafür vorgesehenen Spalt in „rotpotentioV2“ zu platzieren. Verwenden Sie einige kleine Ersatzschrauben von Ihren kleinen Servos.
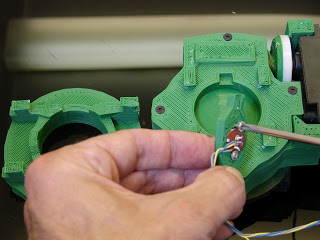

PS: „rotmitV2 sollte auf den drei obigen Bildern nicht links stehen, da Sie es bereits montiert haben …“

Schieben Sie „pistonanticlockV1“ in „pistonbaseV1“. Ich habe „pistonanticlockV1“ innen mit einer Metallstange verstärkt. Man kann es aber so verwenden, es sollte halten. Bei meinen Tests sind mir einige davon kaputt gegangen, und ich war froh, dass sie statt etwas anderem kaputt gegangen sind.
„higharmV1“ zu „rotmitV1“ zusammenbauen, Zange verwenden, mit ABS passt es einfach perfekt, ich hatte das Gefühl, mit Legos zu spielen. Stellen Sie sicher, dass Sie die gleiche Position wie auf dem Bild haben.

Fügen Sie „pistonbaseV1“ und „spacerV1“ hinzu. Befestigen Sie das Potentiometer. Achten Sie auch hier darauf, die kleine Metallplatte des Potentiometers in den dafür vorgesehenen Spalt zu platzieren.

Montieren Sie den Rest von „higharmV1“ und „lowarmV1“. Später, nach Ihren Tests, müssen Sie diese Teile kleben.

Befestigen Sie das Servo im „ServohalterV1“.

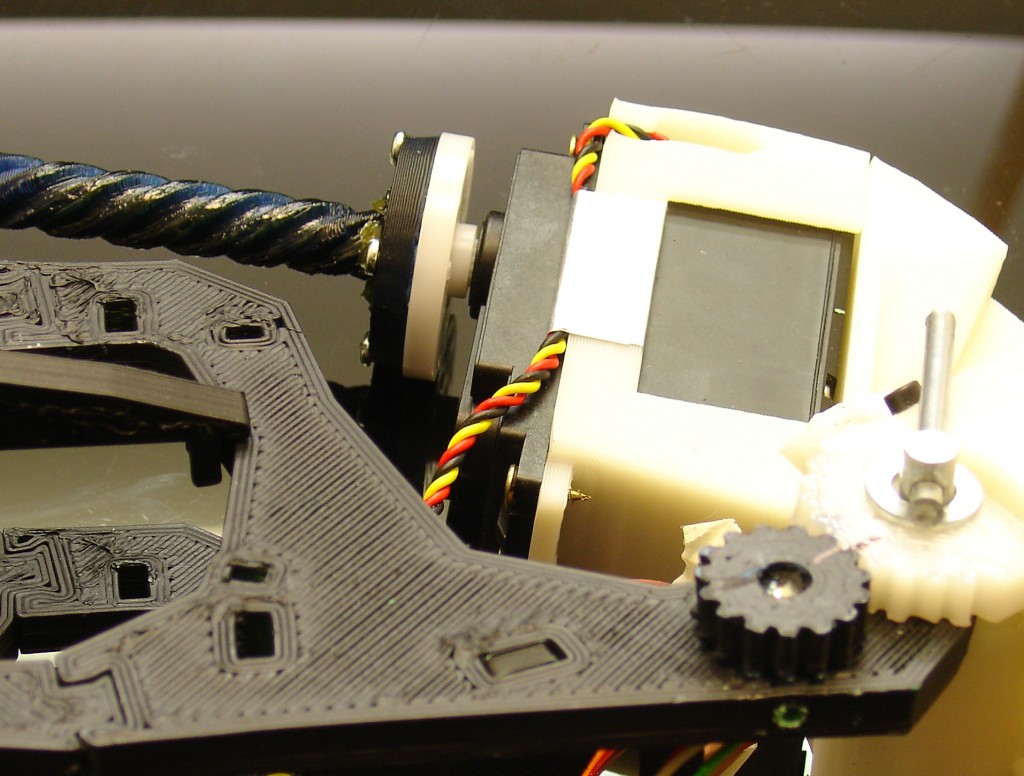
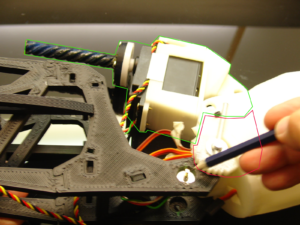
Verlegen Sie die Kabel wie abgebildet.

Verlegen Sie das Kabel entlang des Rahmens, wie auf diesem Bild gezeigt. Ich habe Aluminiumband verwendet, um ein Einklemmen des Kabels während der Betätigung zu vermeiden. Machen Sie dasselbe auf der anderen Seite mit den Potentiometerdrähten.
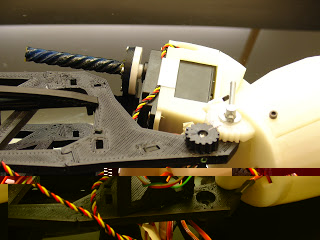
Befestigen Sie „servobaseV1“ und „pistonanticlockV1“ am Aktuator.

Drehen Sie „pistonanticlockV1“ in „pistonbaseV1“ um. Das Hinzufügen von Fett ist eine gute Idee.
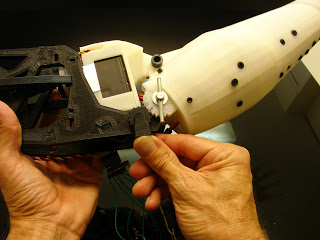
Ich gehe also davon aus, dass Sie hier bereits „elbowshaftgearV1“ auf „robcap3V1“ geklebt haben. Sie haben also auch den Unterarm am Bizeps befestigt. Gut.
Hier kommt der Teil, der für mich am schwierigsten zu erklären ist. Lehnen Sie sich nun nach unten „Servobase“ und befestigen Sie es am Unterarm.
Sie sollten an der Basis einen Abstand HALTEN, dies wird Ihre 0°-Grad-Position sein. Fixieren oder markieren Sie den gesamten Arm in dieser Position, es ist wichtig, ihn bei den nächsten Schritten nicht zu verlieren.
Demontieren Sie die Servopistole. Schließen Sie Ihr Servo an das Arduino-Board an und führen Sie eine Skizze aus, um die 0°-Position Ihres Servos zu ermitteln. Es dreht sich kontinuierlich. Drehen Sie nun von Hand das Potentiometer, bis sich das Servo nicht mehr dreht. Dies ist Ihre 0°-Grad-Position.
Montieren Sie das „potentiogearV1“ am Potentiometer und achten Sie darauf, dass sich der Arm und das Potentiometer nicht bewegen.
Den „GearholderV1“ einclipsen. Zwischen den beiden Zahnrädern darf kein Spiel vorhanden sein. Lassen Sie die Servopistole unmontiert und machen Sie wie zuvor einen Test mit Ihrem Arduino bei 0°Grad. Sie können den Arm langsam von Hand in die geschlossene und offene Position bewegen, um zu überprüfen, ob alles in Ordnung ist. Montieren Sie die Servopistole wieder.
Großer Moment jetzt. Führen Sie den Test erneut bei 0°Grad durch. Der Arm sollte sich öffnen und dabei den zuvor sichtbaren Spalt an der Basis beibehalten. Wenn nicht, wird der „PistonanticlockV1“ kaputt gehen.

Machen Sie einen weiteren Test bei 0°Grad bis 60°Grad. Überprüfen Sie den verbleibenden Platz zwischen „pistonanticlockV1“ und „pistonbaseV1“. Mein Arm kann sich bis zu 90° bewegen, aber achten Sie darauf, dass alles von der eingestellten Lücke abhängt. Versuchen Sie es also mit 10° mal 10° Grad. Denken Sie beim Schreiben Ihrer Skizzen daran, nie über das beste Ergebnis hinauszugehen, das Sie erzielt haben.
Jetzt können Sie einen Test durchführen, bei dem das an „rotcenterV1“ befestigte Servo auf 90° gedreht wird. Dies ist die „Ruhe“-Position des Arms, wenn er an der kommenden Schulter befestigt wird.
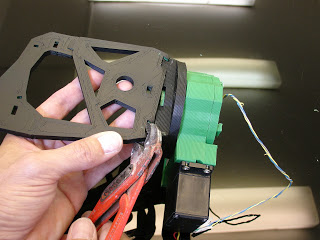
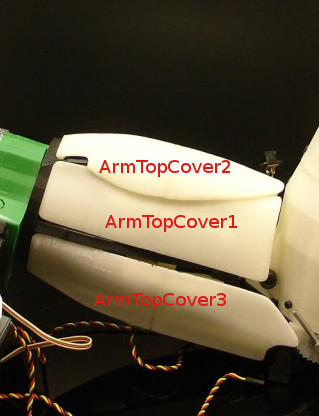
Fügen Sie die Abdeckungen am Bizeps hinzu, um die Struktur zu verstärken.
An diesen Teilen gibt es keine zu entfernende Stütze. Sie müssen jedoch die winzigen Verbindungen zwischen den Teilen durchschneiden, um sie zu trennen. Eine Schneidklinge funktioniert mit ABS, beim Drucken aus PLA müssen Sie möglicherweise ein Messer mit Zähnen verwenden.
Die Bezüge werden passend zum Bizeps zusammengeklebt, wie auf diesem Bild:
Normalerweise sollten Sie bereit sein. Ich hoffe, das hat geholfen, denn ich habe viel Zeit für dieses Tutorial gebraucht
hier können Sie einen Adruino Test Script runterladen!
Schreibe einen Kommentar