In diesem Teil der Anleitung erläutere ich, wie Sie ein Finger Tester / Starter- Set gebaut wird, dies dient als Übung um mit den Fingern besser klarzukommen, quasi als Übungsaufgabe.
Basisinformationen:
Für den Druck der 3D-Modelle verwenden wir diesen Drucker.
Um den Druck gewährleisten zu können, sollten folgende Informationen beachtet werden!
Für die Filament Beschaffung können diese Posts eventuell sehr hilfreich sein.
Hilfe & Anleitung Videos findest du hier
Download STL-Files für Finger Starter:
– Zeigefinger Filament: PLA Farbe: Schwarz Verbrauch: 9 g Druckzeit: 0:39 Std.
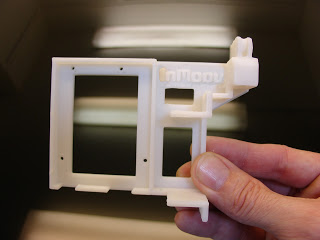
– Fingertester Filament: PLA Farbe: Schwarz Verbrauch: 21 g Druckzeit: 0:49 Std.
– Servoring Filament: PLA Farbe: Schwarz Verbrauch: 7 g Druckzeit: 0:07 Std.
– Sehnenzug Filament: PLA Farbe: Schwarz Verbrauch: 2 g Druckzeit: 0:06 Std.
Filament-verbrauch : 39 g Druckzeit: 1:28 Std.
Benötigte Technik und Materialien für diesen Fertigungsabschnitt:
– 1 Meter Angelschnur
– 1 x Sekundenkleber / 2 Komponenten Kleber
– 1 x Fett / Schmiermittel
– 4 x 3 mm x 2 cm große Schrauben für alle Fingerscharniere (an Fingerbreite anzupassen)
– 1 x Servo MG996R
– 1 x Druck / Hall Sensorgen
Informationen:
Das wird interessant!!
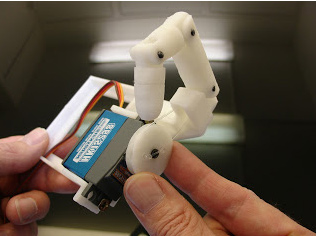
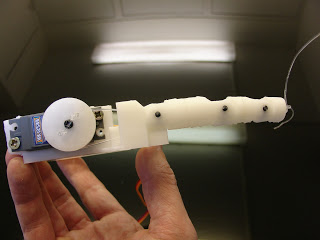
Wir werden einen Finger zu einem kleinen Servo zusammenbauen, um ihn mit einem Arduino-Board zu testen. Das Servo, das ich auf den Bildern verwendet habe, ist ein digitales HK15298, aber Sie können auch ein billiges analoges MG996R oder sogar ein günstigeres verwenden, wenn Sie es finden und die Größenspezifikationen gleich sind.
Das hier verwendete Arduino-Board ist ein Arduino Uno. Es ist am besten, eine externe Stromversorgung hinzuzufügen, denn selbst wenn diese Servos klein sind, verbrauchen sie zu viel Strom, was zu einem Neustart Ihres Boards führt oder führen könnte.
Am Ende dieser Anleitung gibt es auch ein Bild, das zeigt, wie Sie Ihr Servo einfach an die Platine anschließen.
Denken Sie daran: Dieser Verbindungsaufbau kann nur ein einzelnes Servo mit geringer Stromaufnahme versorgen. Wenn Ihre Platine sich selbst zurücksetzt oder das Servo zittert, bedeutet dies, dass Ihr Servo einen zu hohen Stromverbrauch für den Stromanschluss hat. Sie benötigen eine externe Stromversorgung.
Anschlüsse und Stromversorgung finden Sie HIER. Diese Verbindungszeichnungen gelten hauptsächlich für die ganze Hand, sie gelten jedoch auch für ein Servo/Finger oder für fünf.
Die Zugstangen, die ich für dieses Tuto verwende, sind Angelnylon, aber das funktioniert nicht am besten, weil es dazu neigt, sich mit der Zeit zu dehnen. Ich empfehle für Roboter einen Angelzopf mit einem Gewicht von 200LB. Für diesen Test können Sie jedoch alles verwenden, was Sie zur Hand haben, solange es sich ziehen lässt und dünn genug ist, um den Finger zu kräuseln.
Wenn Sie alle Teile gedruckt haben, das Material beschafft haben können wir nun mit der Fertigung anfangen
Abschnitt 1

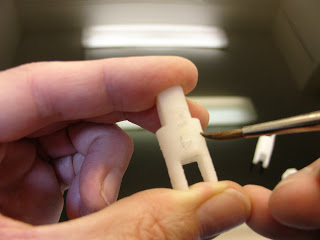
Bohren Sie die Löcher für die Seitenscharniere erneut mit einem 3-mm-Bohrer.
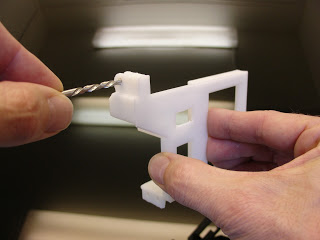
Die inneren Scharnier löcher sollten mit einem 3,5-mm-Bohrer nachgebohrt werden.

Daher sollten die Innenscharniere des Fingers ebenfalls mit einem 3,5-mm-Bohrer bearbeitet werden.

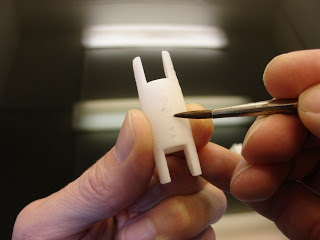
Beachten Sie, dass auf den Fingerteilen Nummern aufgedruckt sind, um den Zusammenbau zu erleichtern.





Abhängig vom Material, das Sie zum Drucken verwendet haben, gibt es unterschiedliche Möglichkeiten, die Teile zusammenzukleben. Wenn Sie PLA-Drucke haben, ist ein Zweikomponenten-Epoxidkleber wirklich gut, Sie können aber auch Zap-A-Gap-Kleber verwenden. Wenn Sie in ABS gedruckt haben, eignet sich Aceton am besten, Sie können aber auch Epoxidharz oder Zap-A-Gap-Kleber verwenden.
Durch das Auftragen einiger Tropfen Aceton werden die Teile miteinander verbunden, so als ob sie in einem Stück gedruckt worden wären. Nehmen Sie also Teil 1 und Teil 2 und kleben Sie sie zusammen.
Kleben Sie Teil 3 und 4 zusammen.

Die Teile 5 und 6 noch nicht verkleben

Nehmen Sie ein Stück Ihres 3-mm-Filaments. Wenn Sie dieses nicht haben, müssen Sie in Ihrem Baumarkt einige 3-mm-Schrauben besorgen.

Lassen Sie es mit einem Cuttermesser zuschneiden.

Schieben Sie es in das Loch und fügen Sie Teil 1/2 bis 3/4 zusammen.

Sobald es die andere Seite erreicht,
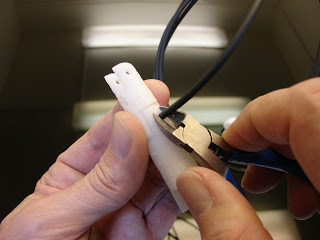
Schneiden Sie das Filament mit einer Zange ab.

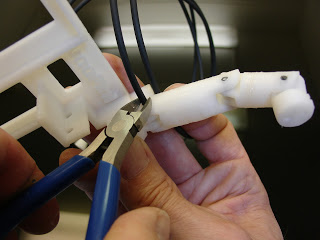
Machen Sie den gleichen Trick mit den Teilen 3/4 bis 5


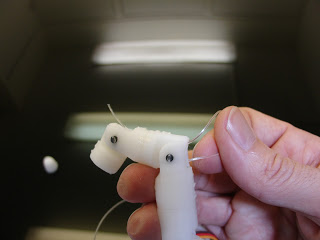
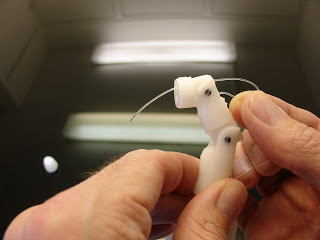
Jetzt haben wir einen Finger, der sich frei bewegen sollte.
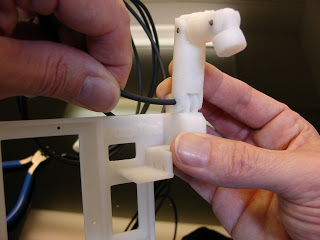
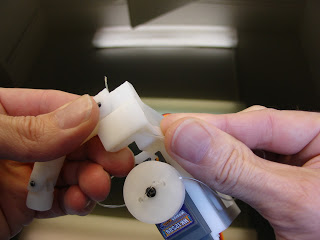
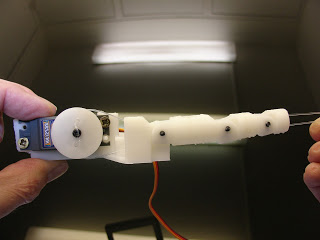
Montieren Sie den Finger mit der gleichen Technik am Hauptteil.
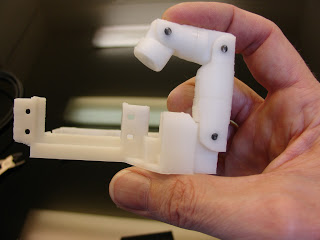
Sie sollten so etwas haben. Es sollte sich frei in diesen Winkel falten lassen.
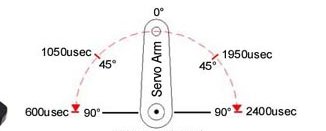
Schauen wir uns nun das Servo an. Wir werden einen beliebigen Nullpunkt auf dem Servo finden. Drehen Sie den Stellantrieb von Hand ganz nach links und notieren Sie, bis er anschlägt. Machen Sie dasselbe mit der linken Seite und notieren Sie, wo es hingegangen ist. Diese beiden Punkte sind die äußersten Positionen Ihres Servos. In der Mitte dieser beiden Punkte legen Sie fest, wo sich der beliebige Nullpunkt befindet. Sie können das mit Ihrem Arduino-Board finden, wenn Sie wissen, wie es geht, aber das ist vorerst eine einfache Lösung, auch wenn sie nicht präzise ist.
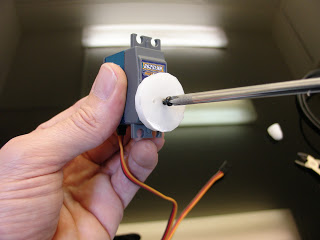
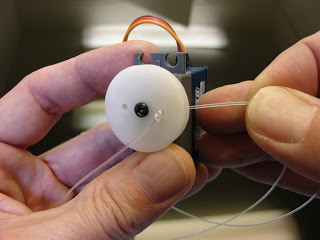
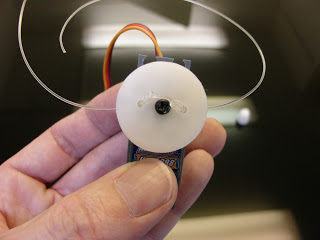
Montieren Sie den „RobRing“ und schrauben Sie ihn an Ihr Servo. Die beiden kleinen Löcher sollten sich an Ihren äußersten Punkten befinden.

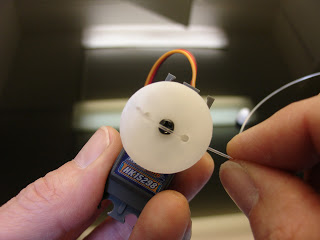
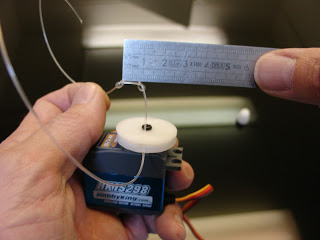
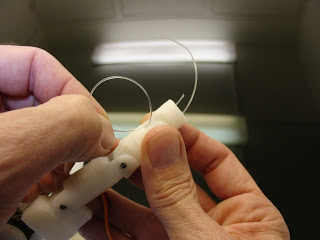
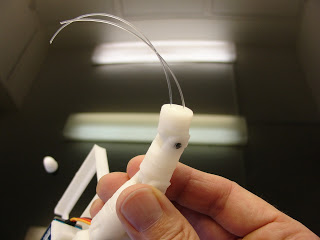
Nehmen Sie ein ca. 50 cm langes Stück Stab. Führen Sie Ihre Rute durch ein Loch.
Machen Sie zwei Knoten etwa 25 cm von Ihrer Rute entfernt, so wie hier. Machen Sie sie gut fest.
Fügen Sie etwa 1 cm vom ersten Satz entfernt einen weiteren Satz Knoten hinzu.
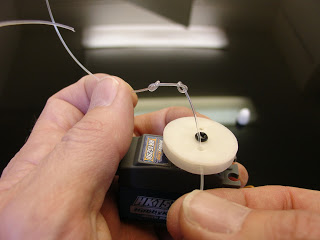
Auf meinem Bild habe ich nur zwei Knoten dieser Art gemacht, aber sie könnten durch das Loch von „RobRing“ verlaufen und das sollte nicht passieren. Das kann man vermeiden, indem man ein paar Knoten hinzufügt.
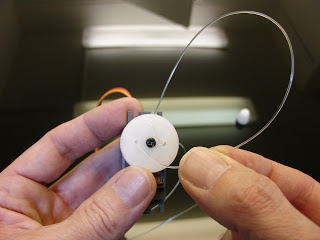
Führen Sie nun das andere Ende der Stange durch das zweite Loch.
Du solltest so etwas haben, mit noch mehr Knoten als ich.
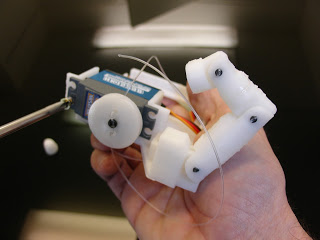
Zeit, das Servo an der Basis zu befestigen.
Führen Sie die untere Stange wie auf den folgenden Bildern durch die Teile.
Achten Sie nur darauf, den Stab nicht umzudrehen, er sollte sich immer auf der Rückseite des Fingers befinden.
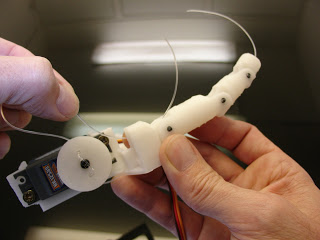
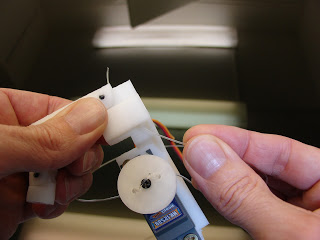
Führen Sie nun den zweiten Stab an der Innenseite des Fingers entlang.


Du solltest so enden.
Überprüfen Sie, ob sich Ihr Servo an seinem willkürlichen Nullpunkt befindet.
Überprüfen Sie, ob sich Ihr Servo an seinem willkürlichen Nullpunkt befindet.
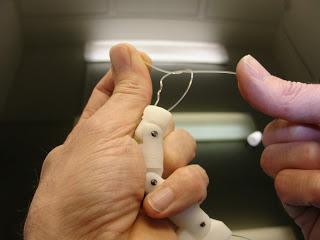
Locken Sie den Finger ein wenig und machen Sie ein paar Knoten zwischen den beiden Drähten.
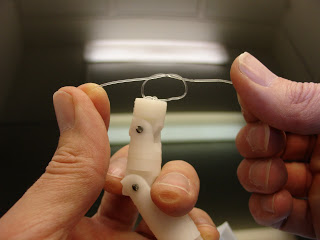
Wenn Sie „RobRing“ von Hand drehen, sollten Sie den Finger in diese Position bringen können. Finger total gestreckt.

Schneiden Sie nun die Stäbe ab.
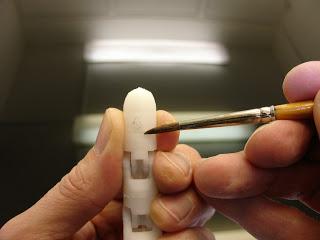
Kleben Sie Teil 6 auf 5. Wenn Sie sich Teil 6 genau ansehen, gibt es eine Nagelseite, und ich habe die Nummer aus ästhetischen Gründen nicht auf den Nagel gesetzt.

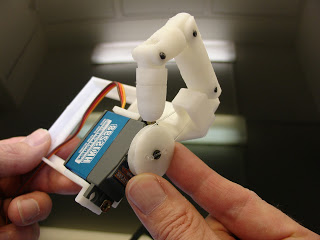
Versuchen Sie, den Finger durch Drehen von „RobRing“ zu bewegen. Er sollte sich frei bewegen lassen, ohne zu blockieren.
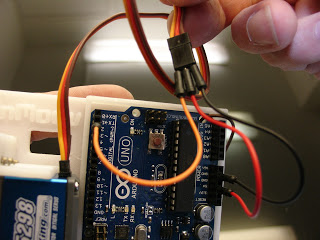
Setzen Sie das Arduino-Board ein und stellen Sie eine Kabelverbindung wie folgt her. Orange oder gelb an Pin3 am PWM. Rot auf +5V. Schwarz oder braun auf Gnd (Masse).
Denken Sie daran: Dieser Verbindungsaufbau kann nur ein einzelnes Servo mit geringer Stromaufnahme versorgen. Wenn Ihre Platine sich selbst zurücksetzt oder das Servo zittert, bedeutet dies, dass Ihr Servo einen zu hohen Stromverbrauch für den Stromanschluss hat. Sie benötigen eine externe Stromversorgung. (siehe am Anfang dieses Tutorials)
Sie können diese FingerStarter-Skizze jetzt auf Ihr Arduino hochladen, um zu sehen, wie es sich bewegt. Wenn Sie Arduino noch nie verwendet haben. Folgen Sie diesem Link oder nutzen Sie dieses Einführungs-PDF.
Schreibe einen Kommentar