In diesem Teil der Anleitung erläutere ich, wie die rechte Hand und der Unterarm mit Handgelenk gedruckt und hergestellt wird. Es ist auch die Druckzeit, Filament-verbrauch und eine Teileliste enthalten.

Basisinformationen:
Für den Druck der 3D-Modelle verwenden wir diesen Drucker.
Um den Druck gewährleisten zu können, sollten folgende Informationen beachtet werden!
Für die Filament Beschaffung können diese Posts eventuell sehr hilfreich sein.
Sollten Sie noch keine Erfahrung mit Hand und Fingerfertigung haben schauen Sie sich diese Informationen zuerst an.
Anleitungs Videos findest du hier! einen Sketch 3D: Hand findest du hier! Der Sketch 3D: Unterarm ist hier zu finden.
Die 3D Bilder Ansicht der Hand und Unterarm Baugruppe kannst du dir hier anschauen.
Diese Kurzanleitung könnte dir auch weiter helfen!
Hier findest du die Anleitung für die Fingerspitzen, das ist Optional
Druckanweisungen:
Drucken Sie Wristarge, Wristsmall, Thumb, mit einer Füllung von 30 %, Wandstärke 2 mm, am besten ohne Stütze, ohne Raft.
Drucken Sie index3, Majeure3, Ringfinger3, Auriculaire3, mit einer Füllung von 30 %, Wandstärke 1,5 mm, am besten ohne Stütze, ohne Floß, ohne Krempe.
Drucken Sie robpart2, robpart3, robpart4, robpart5 mit einer Füllung von 30 %, Wandstärke 2 mm, am besten mit Krempe, ohne Raft, ohne Stütze.
Drucken Sie Deckelfinger mit einer Füllung von 30 %, Wandstärke 2 mm, mit Stütze. Um das beste Druckergebnis auf den Fingerdeckel zu erzielen, sollten Sie sie im Stehen bedrucken und nicht flach hinlegen.
Die Handgelenksteile sind gut bedruckt, mit einer Füllung von 30 %, Wandstärke 2 mm, ohne Steg, ohne Krempe, ohne Stütze. Die Zahnräder des Handgelenks sollten mit der besten Qualität gedruckt werden, die Ihr Drucker Ihnen bieten kann.
Große Schrauben sind jetzt druckbar. (Stark genug für Tests und noch mehr!)
Sie können die 16 x 3 mm für die Finger durch Stifte aus Filament anstelle von Schrauben ersetzen. Das ist billig, einfach und stark genug.
Wenn Sie die Rechte Seite herstellen möchten, laden Sie diese Dateien herunter:
Download STL-Files für die rechte Hand:
– Handabdeckung Filament: PLA Farbe: Schwarz Verbrauch: 59 g Druckzeit: 2:15 Std.
– Hand Teil 1/2 Filament: PETG Farbe: Silber Verbrauch: 17 g Druckzeit: 0:42 Std.
– Hand Teil 2/2 Filament: PETG Farbe: Schwarz Verbrauch: 42 g Druckzeit: 1:18 Std.
– Daumen Filament: PETG Farbe: Silber Verbrauch: 17 g Druckzeit: 0:57 Std.
– Zeigefinger Filament: PETG Farbe: Silber Verbrauch: 9 g Druckzeit: 0:37 Std.
– Mittelfinger Filament: PETG Farbe: Silber Verbrauch: 11 g Druckzeit: 0:42 Std.
– Ringfinger Filament: PETG Farbe: Silber Verbrauch: 8 g Druckzeit: 0:35 Std.
– Kleinfinger Filament: PETG Farbe: Silber Verbrauch: 7 g Druckzeit: 0:27 Std.
– Fingerabdeckungen Filament: PLA Farbe: Schwarz Verbrauch: 9 g Druckzeit: 0:37 Std.
– Bolzen Filament: PETG Farbe: Silber Verbrauch: 10 g Druckzeit: 0:35 Std.
Filament-verbrauch : 198 g Druckzeit: 10 Std.
Download STL-Files für das rechte Handgelenk:
– Handgelenk Teil 1/2 Filament: PETG Farbe: Silber Verbrauch: 33 g Druckzeit: 1:36 Std.
– Handgelenk Teil 2/2 Filament: PETG Farbe: Silber Verbrauch: 17 g Druckzeit: 0:47 Std.
– Handgelenk Drehung Filament: PETG Farbe: Silber Verbrauch: 8 g Druckzeit: 0:18 Std.
– Zahnräder Filament: PETG Farbe: Silber Verbrauch: 7 g Druckzeit: 0:20 Std.
– Kabel Halterung Filament: PETG Farbe: Silber Verbrauch: 4 g Druckzeit: 0:16 Std.
Filament-verbrauch : 69 g Druckzeit: 3:17 Std.
Download STL-Files für den rechten Unterarm:
– Unterarm Teil 1/4 Filament: PETG Farbe: Silber Verbrauch: 39 g Druckzeit: 1:38 Std.
– Unterarm Teil 2/4 Filament: PETG Farbe: Silber Verbrauch: 36 g Druckzeit: 1:15 Std.
– Unterarm Teil 3/4 Filament: PETG Farbe: Silber Verbrauch: 44 g Druckzeit: 1:53 Std.
– Unterarm Teil 4/4 Filament: PETG Farbe: Silber Verbrauch: 55 g Druckzeit: 2:21 Std.
– Konnektor Oberarm Filament: PETG Farbe: Silber Verbrauch: 18 g Druckzeit: 0:34 Std.
Filament-verbrauch : 192 g Druckzeit: 7:41 Std.
Download STL-Files für das rechte Innenleben des Unterarms:
– Servos Halterung Filament: PETG Farbe: Silber Verbrauch: 33 g Druckzeit: 1:30 Std.
– Kabelhalterung Vorne Filament: PETG Farbe: Silber Verbrauch: 9 g Druckzeit: 0:20 Std.
– Kabelhalterung Hinten Filament: PETG Farbe: Silber Verbrauch: 5 g Druckzeit: 0:11 Std.
– Sehnen Spanner Filament: PETG Farbe: Silber Verbrauch: 11 g Druckzeit: 0:40 Std.
– Servos Ringe Filament: PETG Farbe: Silber Verbrauch: 9 g Druckzeit: 0:31 Std.
– Servo Sehnen Zug Filament: PETG Farbe: Silber Verbrauch: 11 g Druckzeit: 0:31 Std.
Filament-verbrauch : 73 g Druckzeit: 3:41 Std.
Wenn Sie die Linke Seite herstellen möchten, laden Sie diese Dateien herunter:
Download STL-Files für die linke Hand:
– Handabdeckung Filament: PLA Farbe: Schwarz Verbrauch: 59 g Druckzeit: 2:15 Std.
– Hand Teil 1/2 Filament: PETG Farbe: Silber Verbrauch: 17 g Druckzeit: 0:42 Std.
– Hand Teil 2/2 Filament: PETG Farbe: Schwarz Verbrauch: 42 g Druckzeit: 1:18 Std.
– Daumen Filament: PETG Farbe: Silber Verbrauch: 17 g Druckzeit: 0:57 Std.
– Zeigefinger Filament: PETG Farbe: Silber Verbrauch: 9 g Druckzeit: 0:37 Std.
– Mittelfinger Filament: PETG Farbe: Silber Verbrauch: 11 g Druckzeit: 0:42 Std.
– Ringfinger Filament: PETG Farbe: Silber Verbrauch: 8 g Druckzeit: 0:35 Std.
– Kleinfinger Filament: PETG Farbe: Silber Verbrauch: 7 g Druckzeit: 0:27 Std.
– Fingerabdeckungen Filament: PLA Farbe: Schwarz Verbrauch: 9 g Druckzeit: 0:37 Std.
– Bolzen Filament: PETG Farbe: Silber Verbrauch: 10 g Druckzeit: 0:35 Std.
Filament-verbrauch : 198 g Druckzeit: 10 Std.
Download STL-Files für das linkes Handgelenk:
– Handgelenk Teil 1/2 Filament: PETG Farbe: Silber Verbrauch: 33 g Druckzeit: 1:36 Std.
– Handgelenk Teil 2/2 Filament: PETG Farbe: Silber Verbrauch: 17 g Druckzeit: 0:47 Std.
– Handgelenk Drehung Filament: PETG Farbe: Silber Verbrauch: 8 g Druckzeit: 0:18 Std.
– Zahnräder Filament: PETG Farbe: Silber Verbrauch: 7 g Druckzeit: 0:20 Std.
– Kabel Halterung Filament: PETG Farbe: Silber Verbrauch: 4 g Druckzeit: 0:16 Std.
Filament-verbrauch : 69 g Druckzeit: 3:17 Std.
Download STL-Files für den linken Unterarm:
– Unterarm Teil 1/4 Filament: PETG Farbe: Silber Verbrauch: 39 g Druckzeit: 1:38 Std.
– Unterarm Teil 2/4 Filament: PETG Farbe: Silber Verbrauch: 36 g Druckzeit: 1:15 Std.
– Unterarm Teil 3/4 Filament: PETG Farbe: Silber Verbrauch: 44 g Druckzeit: 1:53 Std.
– Unterarm Teil 4/4 Filament: PETG Farbe: Silber Verbrauch: 55 g Druckzeit: 2:21 Std.
– Konnektor Oberarm Filament: PETG Farbe: Silber Verbrauch: 18 g Druckzeit: 0:34 Std.
Filament-verbrauch : 192 g Druckzeit: 7:41 Std.
Download STL-Files für das linke Innenleben des Unterarms:
– Servos Halterung Filament: PETG Farbe: Silber Verbrauch: 33 g Druckzeit: 1:30 Std.
– Kabelhalterung Vorne Filament: PETG Farbe: Silber Verbrauch: 9 g Druckzeit: 0:20 Std.
– Kabelhalterung Hinten Filament: PETG Farbe: Silber Verbrauch: 5 g Druckzeit: 0:11 Std.
– Sehnen Spanner Filament: PETG Farbe: Silber Verbrauch: 11 g Druckzeit: 0:40 Std.
– Servos Ringe Filament: PETG Farbe: Silber Verbrauch: 9 g Druckzeit: 0:31 Std.
– Servo Sehnen Zug Filament: PETG Farbe: Silber Verbrauch: 11 g Druckzeit: 0:31 Std.
Filament-verbrauch : 73 g Druckzeit: 3:41 Std.
Der gesamte Filament-Verbraucht: ca 532 g Die gesamte Druckzeit: ca 25 Std.
Benötigte Technik und Materialien für diesen Fertigungsabschnitt:
– 5 Meter Angelschnur
– 1 x Sekundenkleber / 2 Komponenten Kleber
– 1 x Fett / Schmiermittel
– 1 x 8mm x 8cm Bolzen zur Befestigung von Wristlarge an Wristsmall.
– 1 x 8 mm x 4 cm große Schraube zur Befestigung des Wriarge an der Daumenunterseite.
– 1 x 8 mm x6 cm Bolzen zur Befestigung von Wriarge an Robpart1.
– 16 x 3 mm x 2 cm große Schrauben für alle Fingerscharniere (an Fingerbreite anzupassen)
– 7 x Servo MG996R
– 10 x Druck / Hall Sensorgen
Wenn Sie alle Teile gedruckt haben, das Material beschafft haben können wir nun mit der Fertigung anfangen
Abschnitt 1

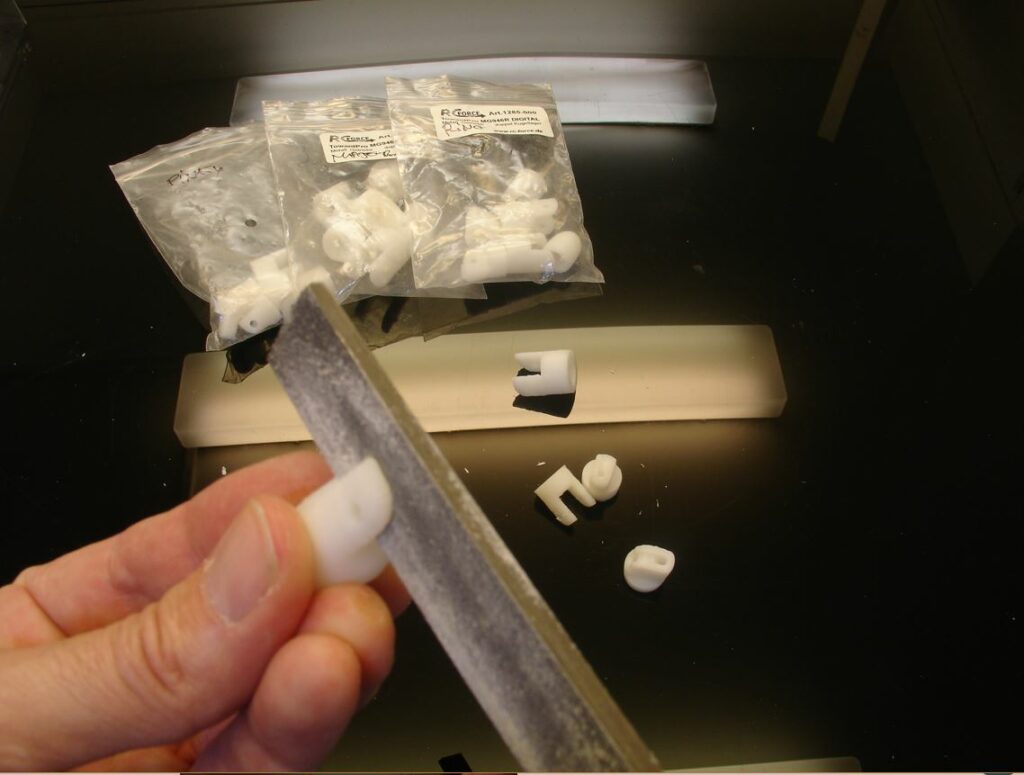
Entfernen Sie die Stützen und schneiden Sie sie mit einem Messer ab, RobPart2, 3, 4 und 5
Robpart2 und Robpart5 zusammenbauen, am besten mit dem Skundenkleber verkleben.
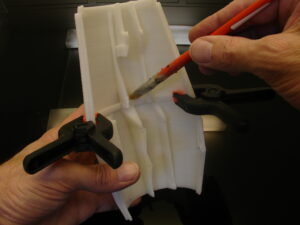
Helfen Sie sich mit einer Zange, um die Teile zusammenzuhalten, während Sie sie mit Aceton oder Zap-A-Gap (ABS) oder Epoxy 2-Komponenten oder Zap-A-Gap (PLA) verkleben

Vermeiden Sie die Verwendung von Klebstoff auf der Außenseite, da es sonst nicht sauber aussieht. Kontrollieren Sie, ob Ihre Teile richtig ausgerichtet sind.

Machen Sie dasselbe mit Robpart3 und 4.

Bohren Sie die Löcher an der Seite von Robpart2 mit einem 6-mm-Bohrer neu (wenn Sie eine frühere Version mit Löchern haben). Diese dienen dazu, ein zusätzliches Servo zu befestigen, um einen doppelt betätigten Daumen zu erhalten.

Verwenden Sie die kleinen Gummi-Silentblocs, die mit Ihren Servos geliefert wurden (wenn Sie die vorherige Version haben).

Setzen Sie in Robpart5 zwei Muttern für 3-mm-Schrauben in die gedruckten Hohlräume ein. Meine passten nicht, wegen Überhang habe ich sie leicht mit einer Feuerzeugflamme erhitzt, damit sie passen.
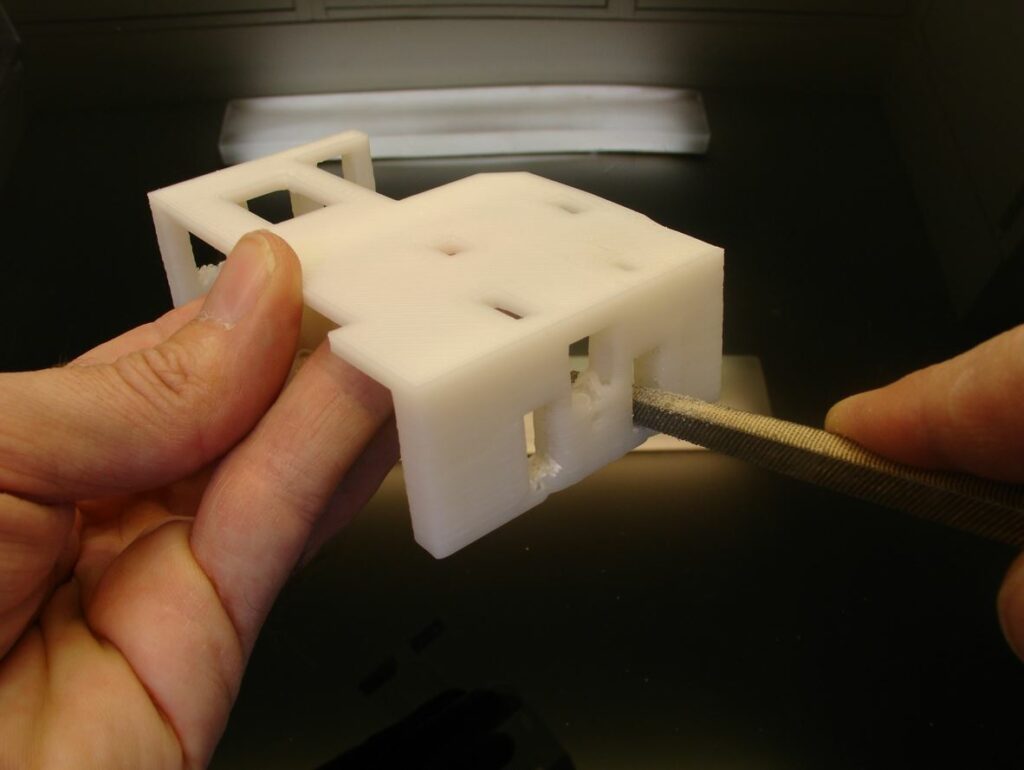
Trimmen/Füllen Sie die Löcher des einfachen Servobettes, wenn es einen Überhang gibt.
Setzen Sie das einfache Servobett in Robpart5 ein und stellen Sie sicher, dass es vollständig auf dem Boden sitzt.
Kleben oder schrauben Sie das einfache Servobett mit 2 Holzschrauben.


Dies ist ein neues Addon (Tensioner.stl). Der Zweck besteht darin, die Spannung auf den Spanngliedern mit einer Zugfeder mit einem Durchmesser von 0,5 mm und einer Länge von 1 cm (13/64 “x 13/16”) konstant zu halten. Verwenden Sie ein kleines Stück Rohr, um die Sehne anzutreiben, um die Erosion der geflochtenen Angelschnur zu vermeiden. Ich habe Sekundenkleber verwendet, um das Stück Schlauch im Ring der Feder zu halten.
WICHTIG: Beim Einstellen der Spannung für die Sehnen sollten die Federn ruhen (nicht gedehnt), da sie sonst nicht den gewünschten Effekt haben. Die Federn sind nur dazu da, der Länge der Sehnen Freiheit zu geben, wenn sich das Handgelenk dreht.
Schrauben Sie also das Addon auf das einfache Servobett und folgen Sie den nächsten Schritten.
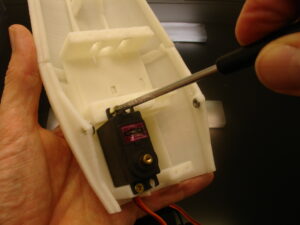
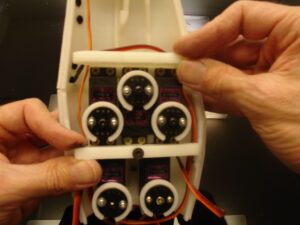
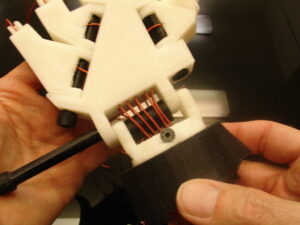
An dieser Stelle können wir die Servos auf einem einfachen Servobett montieren.
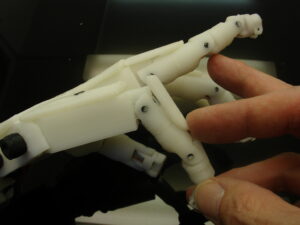
Wie Sie auf meinem Bild sehen können, verwende ich für dieses Anleitung nicht den HK15298, sondern einen MG996r. Der Grund dafür ist, dass bei Hobbyking Europe nicht vorrätig ist.
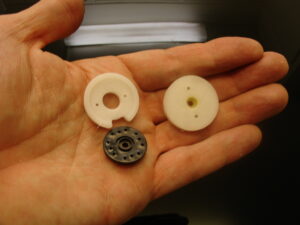
Sie können Sie entweder RobRing oder ServoPulley drucken. Es kommt ganz darauf an, ob Sie mit Ihren Servos den abgebildeten schwarzen Aktuator in meiner Hand erhalten haben.


Ich persönlich benutze die ServoPulley. Bohren Sie die Löcher mit einem 2-mm-Bohrer nach.
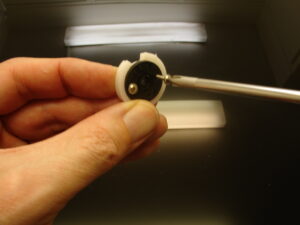
Verwenden Sie die Schrauben, die mit Ihren Servos geliefert wurden, um den schwarzen Aktuator zu montieren.

Schneiden Sie die Schrauben auf der Rückseite mit einem Cutter ein.
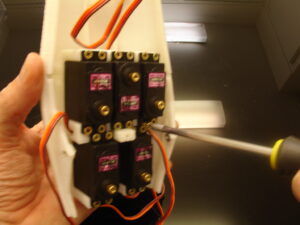
Stellen Sie alle Ihre Servos auf 90 Grad ein. Schrauben Sie alle Servoriemenscheiben wie abgebildet fest. Sobald die ServoPulleys repariert sind, stellen Sie mit dem Skript erneut alle Servos auf Null Grad. Dies wird für später sein, wenn wir die Angelschnüre anbringen. Vermeiden Sie es, sie in den nächsten Schritten zu verschieben, da Sie sie sonst später auf Null zurücksetzen müssen.

Montage auf einfachem Servobett, RobCableFront und RobCableBack.
Abschnitt 2
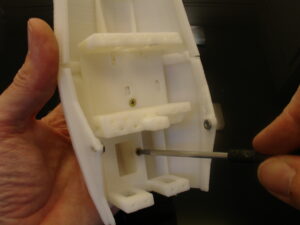
Entfernen Sie am RotaWrist1 die Stütze.

Bohren Sie bei Bedarf die Löcher für die Auskleidung neu.

Stellen Sie sicher, dass es auf die Robparts passt.

Mit einer Füllung können Sie es perfekt anpassen.
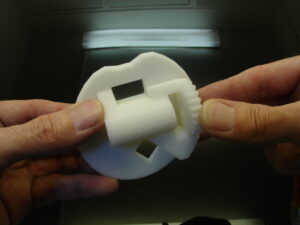
Dies ist die richtige Art der Montage. Robpart2 und Robpart5 werden auf RotaWrist1 geklebt. Ich habe viele Montagen gesehen, bei denen das Handgelenk umgekehrt montiert war. Beachten Sie den quadratischen Teil auf RotaWritst. Er sollte mit dem einzelnen Loch von Robpart2 (vier schwarze Löcher beim Vorgängermodell) ausgerichtet sein.

Kleben Sie RotaWrist1 auf Robpart2. Dabei empfiehlt es sich, auch die Robpart3/4-Abdeckung anzubringen, um sicherzustellen, dass das RotaWrist1 richtig platziert ist.

Setzen Sie Ihr MG996-Servo ein. Hier wollen wir ein Servo mit 180 Grad Drehung. Der HK15298 lässt sich nur um 90 Grad drehen.
Setzen Sie die Holzschrauben ein, um Ihr Servo zu befestigen.

Nachbohren mit einem 2,5-mm-Bohrer RotaWrist2.

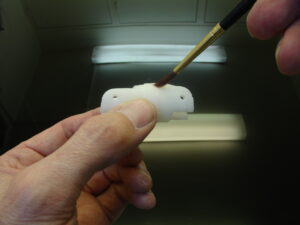
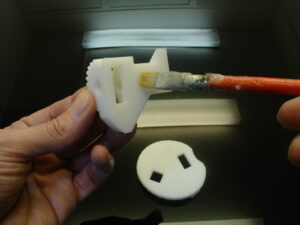
Ich sprühe gerne Farbe mit schwarzem RotaWrist2, weil das darin verwendete Fett nach einiger Zeit dazu führt, dass das Teil gelb wird.

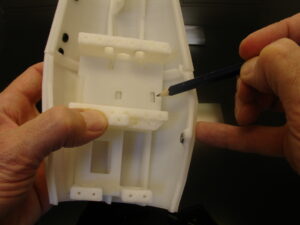
Dieses Bild soll zeigen, wo das zusätzliche Servo eingestellt werden muss, wenn Sie den Daumen mit Doppelbetätigung verwenden.

Redrill mit 8 mm RotaWrist3.


Bei Ihren Downloads gibt es zwei verschiedene kleine Gänge. Verwenden Sie den, der Ihrer Meinung nach für Ihre Bedürfnisse am besten geeignet ist. Hier ist ein früheres Tuto, das Sie vielleicht lesen möchten.

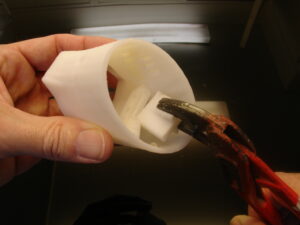
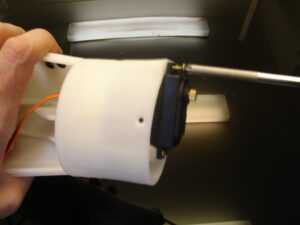
Verwenden Sie einen Zweikomponenten-Epoxidkleber, um CableHolderWrist am Servo zu befestigen.


Zwischen den Bauteilen Fett verwenden. Durch die Verwendung eines weißen Silikonfetts vermeiden Sie einen gelblichen Effekt auf der Außenseite Ihres Drucks.

Da ich gelbes Fett verwendet habe, sprühe ich diesen Teil mattschwarz ein.

Montieren Sie RotaWrist3 an der großen Gear.
Abschnitt 3
Sehen Sie sich auch dieses Tutorial an, um Silikon-Fingerspitzen zu erstellen.

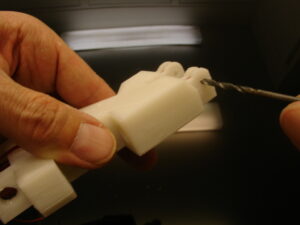
Zeit, die Fingerscharniere neu zu bohren. Ich bewahre die Finger in getrennten Beuteln auf, um ein Vermischen zu vermeiden.

Das Außenscharnier wird mit einem 3-mm-Bohrer nachgebohrt.

Das Innenscharnier wird mit einem 3,2 oder 3,5 mm Bohrer nachgebohrt.

Füllen Sie die Scharniere, um sie optimal anzupassen.
Kleben Sie die Teile mit Aceton (ABS) zusammen.

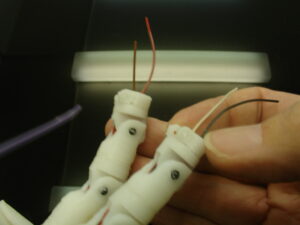
Verwenden Sie Ihr 3-mm-Filament, um Stifte herzustellen.

Schneiden Sie das Filament mit einem Messer ab. Wenn Sie kein 3-mm-Filament haben, müssen Sie dies mit 3-mm-Schrauben tun. Ich empfehle das Filament, es ist perfekt, günstig und schnell.

Bohren Sie alle Löcher der Abdeckungen mit einem 3-mm-Bohrer neu.


Redrill Wristmall und Wristlarge mit einem 2,5-mm-Bohrer zum Anpassen der Abdeckungen. Wenn Sie nicht genau diese Schraubengröße haben, ist das eigentlich egal. Verwenden Sie alles, was Sie in Ihrem Baumarkt finden. Denken Sie daran, dass die Abdeckungen einen Zweck erfüllen und für eine ordnungsgemäß funktionierende Hand erforderlich sind. Sie verhindern, dass Wristmall auf den Handrücken gelangt. Wenn Sie es nicht verstehen, lesen Sie dies.

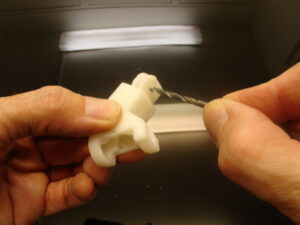
Bohren Sie die Scharniere von Wristmall und Wristlarge erneut mit einem 3,2- oder 3,5-mm-Bohrer

Bohren Sie die großen Scharniere mit einem 8-mm-Bohrer neu.

Stellen Sie sicher, dass Bolzen oder gedruckte Bolzen reibungslos und ohne Widerstand, aber ohne Wackeln laufen.
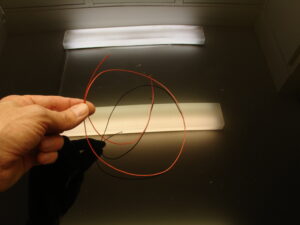
Schneiden Sie 10 75 cm lange Stücke Ihrer geflochtenen Angelschnur mit einem Gewicht von 200 Pfund ab. Verwenden Sie kein normales Nylon, da es sich dehnt.
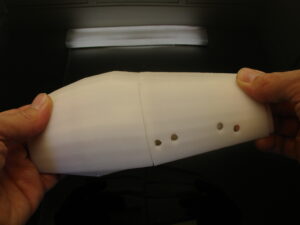
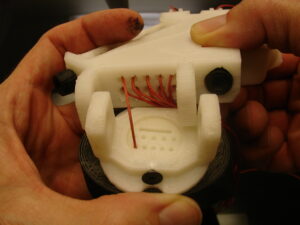
An diesem Punkt ist es gut zu entscheiden, ob Sie Sensoren an den Fingerspitzen haben möchten oder nicht. Sie müssen in WristLarge drei Löcher übereinander für die Auskleidung gesehen haben. Das dritte Loch (mittleres) dient zum Verlegen von Elektrokabeln zur Verkabelung der Sensoren.
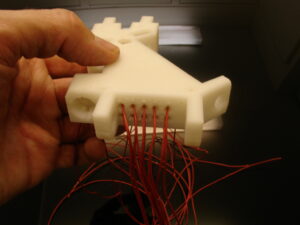
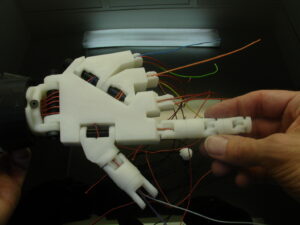
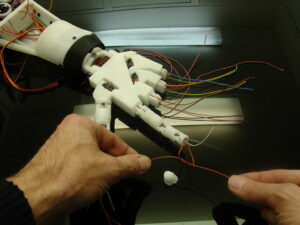
Führen Sie die geflochtenen Fischschnüre in die Löcher von Wristlarge ein. Auf diesem Bild habe ich keine elektrischen Kabel für die Sensorfinger, da es sich um eine frühere Version handelte.

Ich habe ein kleines Loch entworfen, das Ihnen bei der Führung der Beläge helfen kann.


Zu diesem Zeitpunkt möchten Sie möglicherweise diese Informationen lesen:
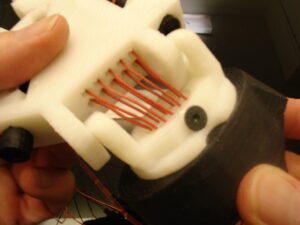
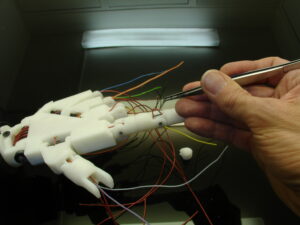
In den mittleren Löchern verlaufen die Elektrokabel.
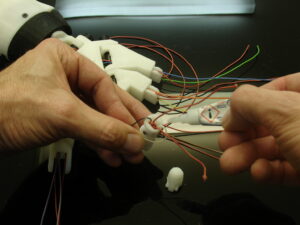
Führen Sie die Auskleidungen in Wristmall ein. Achten Sie darauf, sie beim Durchgehen nicht zu verdrehen. Wenn Sie sie verwechseln, können die Servos die Finger nicht richtig betätigen.
Wiederholen Sie die Verkabelung mit dem Daumen. Wenn Sie Elektrokabel verwenden, verwenden Sie nicht die „Entretoise“, wie oben gezeigt, da Sie sonst die Elektrokabel nicht verlegen können.

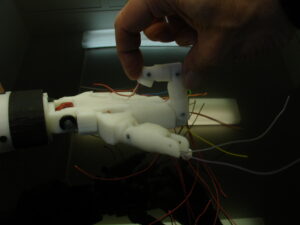
Richten Sie die Hand am Handgelenk aus.

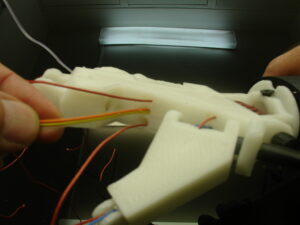
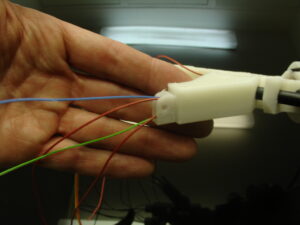
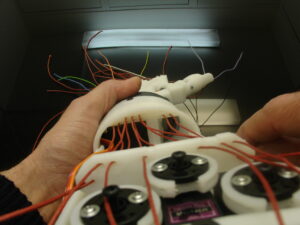
Verkabeln Sie nun das Handgelenk mit dem Unterarm. Jedes Futter hat einen Schlitz.
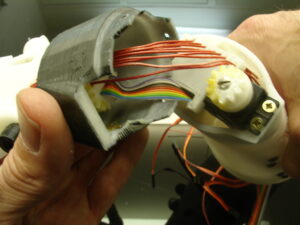
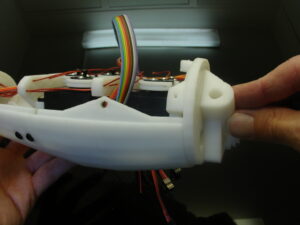
Wenn Sie ein Stromkabel haben, wird es so sein. Die Verwendung eines Farbbandes ist eine gute Idee, da Sie wissen, welcher Draht zu welchem Finger und Anschluss gehört.
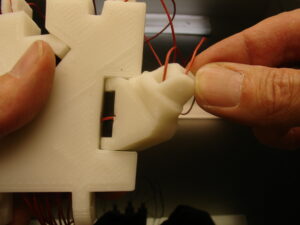
Fügen Sie „Entretoise“ zwischen den Kabeln hinzu

Verwenden Sie den „C“-Ring, um zu verhindern, dass der Bolzen herauskommt.

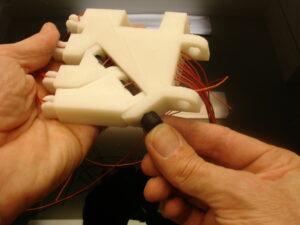
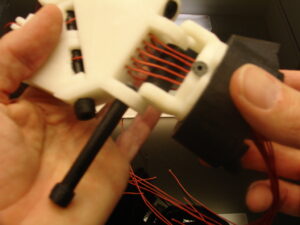
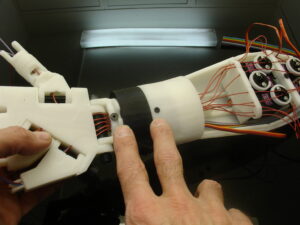
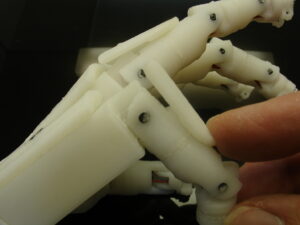
Dies ist die Rückseite der Hand, Sie können sehen, wie ich die Kabel verlegt habe. Ich bin mir nicht sicher, ob es die beste Lösung ist, aber wie Sie lerne und entdecke ich.
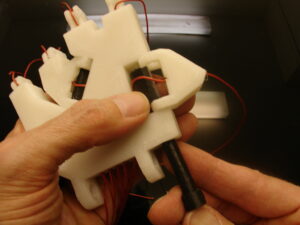
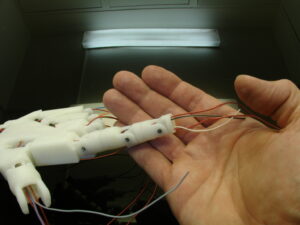
So sollte das Futter bis zum Handgelenk aussehen.
Stellen Sie beim Zusammenbau des Handgelenks sicher, dass das Servo im 90-Grad-Winkel eingestellt ist und dass die beiden Schrauben auf dem Bild ausgerichtet sind. Bisher habe ich dazu noch nie eine Empfehlung abgegeben, und leider können viele der von mir erstellten Gesten nicht von anderen Roboter reproduziert werden, da das Handgelenk nicht auf das gleiche eingestellt ist wie bei mir.
Kleben Sie RobCap auf ElbowShaftGear.
Das Ausrichten des Steinbruchlochs ist der richtige Weg. Wenn Sie ABS und Aceton verwenden, kann ich Ihnen sagen, dass keine Schrauben angebracht werden müssen, wenn beide Oberflächen korrekt flach sind.
Kleben Sie nun diese Baugruppe auf RobPart5 und stellen Sie sicher, dass sie richtig in den Schlitzen ausgerichtet ist.
Anschnitt 4

Beim Zusammenbau der Finger gibt es Markierungen, anhand derer Sie erkennen können, in welcher Reihenfolge Sie vorgehen müssen. Ich werde hier nicht näher auf diese Details eingehen, aber weitere Anweisungen finden Sie im Fingerstarter-Tutorial. Der Fingerstarter hat Zahlen zum leichteren Verständnis, die normalen Finger haben diese Zahlen nicht, aber die Teile sind die gleichen.


Nachdem Sie nun alle Finger zusammengebaut haben, erfahren Sie hier, wie wir für diejenigen vorgehen, die Sensoren hinzufügen möchten.

Fingersensorabdrücke. Laden Sie sie herunter.

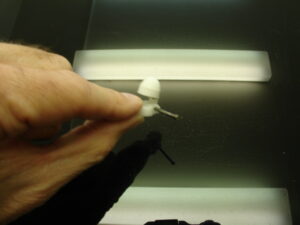
Kleben Sie die Fingerspitze auf die Scharnierspitze. Achten Sie darauf, die Nagellinien auszurichten, das sieht dann besser aus

Entschuldigung für das verschwommene Bild.
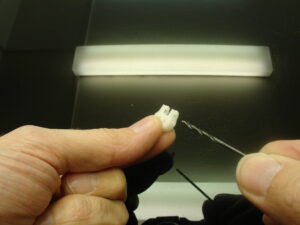
Bohren Sie die Löcher des Scharniers mit einem 2-mm-Bohrer neu.

Bohren Sie das Loch des Spitzenscharniers mit demselben Bohrer erneut.

Fügen Sie das Scharnier zum Spitzenscharnier hinzu und bohren Sie sie erneut zusammen, um sicherzustellen, dass sie gut passen.
Ich habe hier nicht flache Metallnägel anstelle von Filamenten verwendet, da diese Teile klein sind. Ich habe sie einfach auf die benötigte Größe zugeschnitten.

Schneiden Sie einige etwa 3 bis 4 mm große Kupferstreifen ab.

Schneiden Sie diese Streifen in kleine Dreiecke um. Diese dienen als Kontaktgeber für den antistatischen Schaum.

Schneiden Sie mit einer Schere einige schöne kleine Runden in Ihren 4/5 mm dicken antistatischen Schaumstoff. Dieser Schaumstoff wird mit elektronischen Bauteilen verkauft, um Stromschläge zu vermeiden. Meistens werfen wir es einfach weg, wenn wir Komponenten kaufen. Man kann es auch in vielen Elektronikgeschäften kaufen. Es enthält Kohlenstoff, der ein elektrischer Leiter ist. Wenn der Schaumstoff gegen die beiden Kontakte gedrückt wird, lässt die Kohle den Strom zwischen ihnen fließen. Je mehr der Schaum gedrückt wird, desto mehr Strom fließt durch. Dies sind die Informationen, die wir an die Arduino-Analog-Pins senden.
Kleben Sie den Schaumstoff mit 2-Komponenten-Epoxidharz auf das Spitzenscharnierteil, wie auf dem Bild gezeigt.

Versuchen Sie, die beiden Teile zusammenzubauen und prüfen Sie, ob sie sich bewegen. Das Scharnierdesign soll verhindern, dass sich das Scharnier weiter als 5 mm dick öffnet.

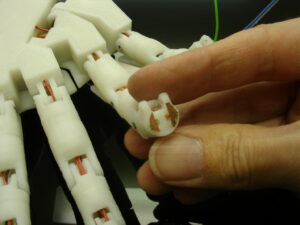
Zeit, den Finger am Handgelenk zu befestigen. Beachten Sie das letzte Scharnier des Fingers. Hier wird die Fingerspitzensensorbaugruppe untergebracht. Alle Löcher in diesen Fingerteilen sollten frei und groß genug sein, um die beiden Spannkabel und die beiden Elektrokabel aufzunehmen.

Zeit, den Finger an Wristlarge zu befestigen. Beachten Sie das letzte Scharnier des Fingers. Hier wird die Fingerspitzensensorbaugruppe untergebracht. Alle Löcher in diesen Fingerteilen sollten frei und groß genug sein, um die beiden Spannkabel und die beiden Elektrokabel aufzunehmen.
Verlegen Sie die Spannseile und die Elektrokabel. Jeweils eines auf der Oberseite und jeweils eines auf der Unterseite. Achten Sie darauf, dass die Kabel nicht verdreht werden, da dies zu funktionsunfähigen Fingern führen kann.
Auch bei dieser Aufgabe ist das Farbband hilfreich.
Falten Sie die Finger, um das Kabel in ihrem Weg etwas zu glätten.
Eine Menge davon ist notwendig, weil wir nicht wollen, dass sie durch die Löcher gehen, wenn die Servos stark an ihnen ziehen.
Ich füge sogar Kleber hinzu, um böse Überraschungen zu vermeiden. Gleichzeitig klebe ich auch die Elektrokabel. Dabei ist es sinnvoll, den Finger zu falten, da sonst das elektrische Kabel später die volle Bewegung des Fingers behindern könnte.
Schneiden Sie die Reste der Spannseile ab. Kleben Sie nun das Scharnier der Fingerspitze auf das letzte Scharnier des Fingers. Beachten Sie die Position, kleben Sie sie nicht verkehrt herum fest. Denken Sie daran, dass ich erwähnt habe, dass das Spitzenscharnier so konstruiert ist, dass es sich nicht weiter als bis zur Dicke des Schaumstoffs öffnet.

Schneiden Sie jedes elektrische Kabel auf eine Länge von 4/5 mm ab. Ein gruseliger Moment, denn zu kurz würde bedeuten, dass die gesamte Verkabelung erneuert werden müsste.

Schneiden Sie den Kunststoff am Elektrokabel ab und löten Sie die Kupferdreiecke.

Wenn Sie fertig sind, falten Sie das Kabel und legen Sie die Kupferdreiecke flach hin.

Fügen Sie 2-Komponenten-Kleber hinzu.

Um sie flach zu halten, während der Kleber hart wird, habe ich etwas Klebeband verwendet. Achten Sie auf das Klebeband, das Sie verwenden, da es möglicherweise auch an den Fingerspitzen klebt.
Das ist das Ergebnis.

Jetzt können Sie die Fingerspitze mit dem Nagel verbinden und Sie sollten einen Sensor haben, der gedrückt werden kann und Rückmeldung gibt.
Kleben Sie die Fingerhüllen auf die Finger.
Diese werden verwendet, um zu verhindern, dass der Finger zu weit nach hinten rutscht, und sie verleihen dem Design außerdem eine besondere Note

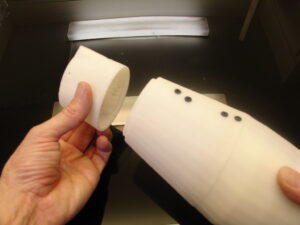
Machen Sie dasselbe mit der Daumenabdeckung und dem Wristsmall. Eigentlich klebe ich sie zuerst und füge dann die Schraube hinzu, die sie gut an Ort und Stelle hält. Schneiden Sie mit einem Messer die beiden Ecken am Daumenscharnier nach. Andernfalls drückt das Scharnier gegen die Handabdeckung.

Fügen Sie die Handabdeckung hinzu und prüfen Sie, ob sich die Finger gut bewegen lassen.

Sie können Sugru auf die Fingerspitzen auftragen oder eine Tischtennisplatte in die Handfläche legen, um einen besseren Halt zu gewährleisten. Ich habe auch einige Küchenhitzeschutzvorrichtungen für 1,50 Euro mit Silikonoberfläche gefunden. Es ist sogar noch besser.
Hey, es sieht so aus, als wären Sie bereit, die geflochtenen Angelschnüre zu spannen!!
Im nächsten Tuto werde ich die einzelnen Schritte noch einmal durchgehen und vielleicht sehen sie auch etwas anders aus. Der Grund sind Aktualisierungen. Tatsächlich wurde das nächste Tuto vor dem Tuto erstellt, dem Sie gerade oben gefolgt sind.
Sollte es noch nicht ganz funktionieren schauen Sie bitte diese Bauanleitung des Finger Starter SET an, dies dient als Übung um mit den Fingersetup besser zu Recht zu finden!
Software zum Testen der Baugruppe:
– Der Servo Motoren Reset Script befindet sich hier.
– Die Braugruppe im MRL testen mittels python Script, kannst du mit diesem Script.
Schreibe einen Kommentar